![]() የተጠቃሚ መመሪያ
የተጠቃሚ መመሪያ![]()

የቅጂ መብት መግለጫ
ማንም ክፍል ወይም ግለሰብ የዚህን ማኑዋል ማንኛውንም ይዘት ማውጣት፣ ማጠናቀር፣ መተርጎም ወይም ማባዛት አይችልም (ለምሳሌ፡- ቴክኒካል ዶክመንቶች፣ ሶፍትዌሮች፣ወዘተ)፣ ወይም በማንኛውም መልኩ (ቁስ እና ህትመቶችን ጨምሮ) ከሼንዘን ዝሆን ሮቦቲክስ ቴክኖሎጂ ኩባንያ የጽሁፍ ፈቃድ ውጭ ማሰራጨት አይችልም። ., Ltd. (ከዚህ በኋላ "ዝሆን ሮቦቲክስ" በመባል ይታወቃል).
በተጨማሪም በዚህ ማኑዋል ውስጥ የተጠቀሱት የምርት መረጃዎች እና ተዛማጅ ሃብቶች ለማጣቀሻ ብቻ ናቸው እና ይዘቱ ያለማሳወቂያ ሊለወጥ ይችላል.
በዚህ ማኑዋል ውስጥ በግልፅ ከተገለጸው በቀር፣ በዚህ ማኑዋል ውስጥ ያለው ምንም ነገር በዝሆን ሮቦቲክስ ለግል መጥፋት፣ ለንብረት ውድመት ወይም ለአንድ ዓላማ የአካል ብቃት ዋስትና ወይም ዋስትና ተብሎ ሊወሰድ አይገባም። መብቱ በህግ የተጠበቀ ነው!
|
ሥሪት |
መግለጫ |
ማስታወሻ |
| ቪ 2020.12.31 | የMyCobot【standard set】፣ የመሠረት መገጣጠሚያ እና የማጠናቀቂያ ስብሰባ ሥዕል ታክሏል። | |
| ቪ 2021.02.04 | የማስተባበሪያ ሲስተም፣ MyStudio ሶፍትዌር ፎቶግራፍ አንሺ ታክሏል። |
አልቋልview
ስለ መመሪያው
የMyCobot የትብብር ሮቦትን ለመጠቀም እንኳን በደህና መጡ እና ለግዢዎ እናመሰግናለን።
ይህ ማኑዋል ማይኮቦትን በትክክል ለመጫን እና ለመጠቀም ጥንቃቄዎችን ይገልጻል። እባክዎ ይህን የሮቦት ስርዓት ከመጫንዎ በፊት ይህንን መመሪያ እና ሌሎች ተዛማጅ መመሪያዎችን ያንብቡ። ካነበቡ በኋላ፣ እባክዎ በማንኛውም ጊዜ እንዲደርሱበት ደህንነቱ በተጠበቀ ቦታ ያስቀምጡት። የመመሪያውን እቃዎች ማንበብ
ይህ መመሪያ የታለመው ለሚከተሉት ነው፡
- ጫኚ.
- አራሚ።
- የጥገና ሠራተኞች.
 |
የMyCobot የትብብር ሮቦትን የሚጭኑ/ያራሙ/የሚጠብቁ በ Elephant Robotics ውስጥ የሰለጠኑ እና ከላይ ለተጠቀሰው ስራ የሚያስፈልገው የሜካኒካል እና የኤሌክትሮኒክስ እውቀት ሊኖራቸው ይገባል። |
እንዴት መጠቀም እንደሚቻል
የሚከተሉትን ሥራዎች ሲሠሩ ይህ ማኑዋል ጥቅም ላይ መዋል አለበት፡-
- የመጫኛ ሥራ: ሮቦቱን ወደ ሥራ ቦታው ያንቀሳቅሱት እና በመጫኛ መመሪያው መሠረት በመሠረቱ ላይ ያስተካክሉት.
- ማረም፡ ሮቦትን ወደ የስራ ሁኔታ ማረም።
- የጥገና ሥራ፡ መደበኛ ሥራውን ለማረጋገጥ መደበኛ የጥገና ሮቦት ሥርዓት። ሮቦቱ በአካባቢያዊ ተጽእኖዎች ወይም በተጠቃሚው ተገቢ ያልሆነ አሠራር ምክንያት ሲበላሽ ወይም የተወሰነ የሮቦት ስርዓት አካል ከመደበኛው የአገልግሎት ህይወት ሲያልፍ ሮቦቱ መጠገን አለበት።
ማስታወሻ፡-
- ይህ መመሪያ ለአለም አቀፍ ተጠቃሚዎች እንዲሁም በሆንግ ኮንግ፣ ማካዎ እና ታይዋን ላሉ ተጠቃሚዎች ተፈጻሚ ይሆናል።
- ይህ መመሪያ በመደበኛነት አይዘመንም። የዘመነው ቀን የስሪት ቁጥር ነው። ተጠቃሚዎች የቅርብ ጊዜውን ስሪት ከኦፊሴላዊው ማውረድ ይችላሉ። webየዝሆን ሮቦት ቦታ በማንኛውም ጊዜ።
ደህንነት
ይህ ምእራፍ በሮቦቶች ላይ የመጫን፣ የመጠገን እና የመጠገን ስራ ለሚሰሩ ሰዎች አጠቃላይ የደህንነት መረጃን ይዘረዝራል። እባክዎ ይህን ምዕራፍ ከመያዝ፣ ከመጫንዎ እና ከመጠቀምዎ በፊት የዚህን ምዕራፍ ይዘቶች እና ጥንቃቄዎች ያንብቡ እና ይረዱ።
1.1 የአደጋ መለያ
የትብብር ሮቦት ደህንነት የሮቦት ትክክለኛ ውቅር እና አጠቃቀም መነሻ ላይ የተመሰረተ ነው, እና ሁሉም የደህንነት መመሪያዎች ቢታዩም, በኦፕሬተሩ ምክንያት የሚደርሰው ጉዳት ወይም ጉዳት አሁንም ሊከሰት ይችላል. ስለዚህ የሮቦት አጠቃቀምን የደህንነት አደጋዎች መረዳት በጣም አስፈላጊ ነው, ይህም ችግሮች ከመከሰታቸው በፊት ለመከላከል ጠቃሚ ነው.
ከዚህ በታች ያሉት ሰንጠረዦች 1-2~4 የተለመዱ የደህንነት አደጋዎች ናቸው ከሮቦቶች አጠቃቀም አንፃር፡
ሠንጠረዥ 1 - 2 አደገኛ የደህንነት አደጋዎች
 |
|
| 1 | በሮቦት አያያዝ ወቅት ትክክል ባልሆነ ቀዶ ጥገና የተከሰተ የግል ጉዳት ወይም የሮቦት ጉዳት። |
| 2 | የግል ጉዳት ወይም ሮቦት ጉዳት የደረሰው ሮቦቱ እንደ አስፈላጊነቱ ስላልተስተካከለ ነው፣ ለምሳሌample, ጠመዝማዛው አልተሰካም ወይም አልተጠበበም, እና መሰረቱ ለከፍተኛ ፍጥነት እንቅስቃሴ ሮቦቱን በተረጋጋ ሁኔታ ለመደገፍ በቂ አይደለም, ይህም ሮቦቱ ወደ ታች እንዲወርድ ያደርገዋል. |
| 3 | የሮቦትን ትክክለኛ የደህንነት ተግባር ውቅር አለማድረግ ወይም የደህንነት ጥበቃ መሳሪያዎችን መጫን ወዘተ የሮቦቱን ደህንነት ተግባር እንዲከሽፍ ሊያደርግ ይችላል። |
ሠንጠረዥ 1-3 የማስጠንቀቂያ ደረጃ የደህንነት ስጋቶች
 |
|
| 1 | ከሮቦቱ ጋር ይጫወቱ፣ በሚሮጥ ሮቦት ሊመታዎት ይችላል፣ ወይም በግል ጉዳት ለማድረስ እንደ ገመድ ባሉ መሰናክሎች ሊሰናከሉ ይችላሉ። |
| 2 | ያልተፈቀደላቸው ሰራተኞች የደህንነት ውቅረት መለኪያዎችን ይለውጣሉ, ይህም የደህንነት ተግባሩ እንዲሳካ ወይም አደጋን ያስከትላል. |
| 3 | ቧጨራዎች እና መበሳት የሚከሰቱት እንደ ሌሎች በስራ አካባቢ ያሉ መሳሪያዎች ወይም የሮቦት የመጨረሻ ውጤት በመሳሰሉ ሹል ንጣፎች ነው። |
| 4 | ሮቦቱ ትክክለኛ ማሽን ነው እና ፔዳል በሮቦቱ ላይ ጉዳት ሊያደርስ ይችላል። |
|
5 |
የ cl ከሆነamp በቦታው ላይ የለም ወይም የሮቦቱ የኃይል አቅርቦት ከመጥፋቱ ወይም የጋዝ ምንጩ ከመጥፋቱ በፊት (የመጨረሻው ተፅዕኖ በኃይል መጥፋት ምክንያት ሳይወድቅ እቃውን አጥብቆ ይይዘው እንደሆነ አልተወሰነም). የ cl ከሆነamped ነገር አልተወገደም፣ አደጋ ሊያስከትል ይችላል፣ ለምሳሌ በአደጋ የተጎዱ ሰዎች። |
| 6 | የሮቦት ድንገተኛ እንቅስቃሴ አደጋ አለ. በምንም አይነት ሁኔታ በሮቦት ዘንግ ስር መቆም የለብዎትም! |
| 7 | ሮቦት ትክክለኛ ማሽን ነው። በአያያዝ ጊዜ በተቀላጠፈ ሁኔታ ካልተቀመጠ ንዝረትን ሊያስከትል እና በሮቦት ውስጣዊ አካላት ላይ ጉዳት ሊያደርስ ይችላል. |
ሠንጠረዥ 1-4 የኤሌክትሪክ ንዝረትን ሊያስከትሉ የሚችሉ የደህንነት አደጋዎች
 |
|
| 1 | ኦሪጅናል ያልሆነ ገመድ መጠቀም ያልታወቀ አደጋ ሊያስከትል ይችላል። |
| 2 | በኤሌክትሪክ መሳሪያዎች አማካኝነት ፈሳሾችን መገናኘት የኤሌክትሪክ ፍሳሽ አደጋን ሊያስከትል ይችላል. |
| 3 | የኤሌክትሪክ ግንኙነቱ ትክክል ካልሆነ የኤሌክትሪክ ንዝረት አደጋ ሊኖር ይችላል. |
| 4 | ኃይሉን ወደ መቆጣጠሪያው እና ተዛማጅ መሳሪያዎች ካጠፉት እና የኤሌክትሪክ ገመዱን ከከፈቱ በኋላ የመተኪያ ሥራን ማካሄድዎን ያረጋግጡ። ኃይሉ በሚበራበት ጊዜ ሥራው ከተከናወነ የኤሌክትሪክ ንዝረት ወይም ብልሽት ሊያስከትል ይችላል. |
1.2 የደህንነት ጥንቃቄዎች
የእኔን ሮቦት ሲጠቀሙ የሚከተሉት የደህንነት ህጎች መከተል አለባቸው፡
- mycobiota የኤሌክትሪክ መሳሪያ ነው. ሙያዊ ያልሆኑ ቴክኒሻኖች ሽቦውን መቀየር አይችሉም, አለበለዚያ, መሳሪያውን ወይም ሰውን ለመጉዳት የተጋለጠ ነው.
- በዚህ መመሪያ ውስጥ ያሉት አደገኛ፣ የማስጠንቀቂያ ምልክቶች ለደህንነት ጥንቃቄዎች ተጨማሪ ናቸው።
- እባክዎን mycobiota በልዩ የአካባቢ ወሰን ውስጥ ይጠቀሙ። ካልሆነ ፣የመግለጫውን እና የመጫኛ ሁኔታዎችን ማለፍ የምርቱን የአገልግሎት ዘመን ያሳጥረዋል አልፎ ተርፎም መሳሪያውን ይጎዳል።
- Mycobiota ን ከመተግበሩ እና ከመቆየቱ በፊት የመትከሉ፣ የመተግበሩ እና ለጥገናው ሀላፊነት ያለባቸው ሰራተኞች የተለያዩ የደህንነት ጥንቃቄዎችን እና ትክክለኛ የአሰራር እና የጥገና ዘዴዎችን እንዲረዱ ስልጠና ሊሰጣቸው ይገባል።
- በማስታወቂያ ላይ mycobiota አይጠቀሙamp ጉዳት እንዳይደርስበት ለረጅም ጊዜ አካባቢ ፣ myCobot ትክክለኛ የኤሌክትሮኒክስ አካላት ነው።
- ከፍተኛ ሙቀት ባለው አካባቢ ውስጥ mycobiota አይጠቀሙ. የ mycobiota ውጫዊ ገጽታ ከፎቶሰንሲቲቭ ሙጫ የተሰራ እንደ ጥሬ እቃ ነው, ከፍተኛ ሙቀት ዛጎሉን ይጎዳል እና ወደ ውድቀት ይመራል.
- በጣም የሚበላሽ ጽዳት mycobiota ን ለማጽዳት ተስማሚ አይደለም. የ anodized ክፍሎች ለመጥለቅ ጽዳት ተስማሚ አይደሉም.
- በመሳሪያው ላይ ጉዳት እንዳይደርስ ወይም አደጋ እንዳይደርስበት የእኔን ሮቦት ያለ መጫኛ መሰረት አይጠቀሙ። myCobot በቋሚ እና በማይደናቀፍ አካባቢ ውስጥ ጥቅም ላይ መዋል አለበት.
- ለ myCobot ሃይል ለማቅረብ ሌላ ሃይል አስማሚዎችን አይጠቀሙ አግባብነት የሌለው አስማሚ በመጠቀም የተበላሸ ከሆነ ከሽያጭ በኋላ አገልግሎት ውስጥ አይካተትም።
- እባካችሁ ዊንጮቹን እና ዛጎላቸዉን አይበታተኑ ወይም አይፍቱ። ከተከፈተ የዋስትና አገልግሎት ሊሰጥ አይችልም።
- ሰዎች ያለ ሙያዊ ስልጠና ማይኮቦትን መጠገን አይችሉም። በእኔ ሮቦት ላይ ችግር ካጋጠመኝ፣ እባክህ myCobot የቴክኒክ ድጋፍ መሐንዲስ በጊዜው አግኝ።
- እባኮትን የተቦረቦረ mycobiota ለመቋቋም እና አካባቢን ለመጠበቅ አግባብነት ያላቸውን ህጎች ያክብሩ።
- ልጆች ከእኔ ሮቦት ጋር ብቻቸውን እንዲጫወቱ አትፍቀድ። በሚሰሩበት ጊዜ ሁሉም ሂደቶች ክትትል ሊደረግባቸው ይገባል. ሂደቶቹ ከተጠናቀቀ በኋላ እባክዎን መሳሪያዎቹን በፍጥነት ያጥፉ።
- በሮቦት ክንድ እና ተዛማጅ መሳሪያዎች ላይ የስም ሰሌዳዎችን ፣ መመሪያዎችን ፣ አዶዎችን እና ምልክቶችን ማሻሻል ወይም ማስወገድ የተከለከለ ነው።
- ሌሎች የምርት ነጂዎችን ወደ ተርሚናል አቶም አያቃጥሉ። በዚህ ምክንያት መሳሪያው ከተበላሸ ከሽያጭ በኋላ ባለው አገልግሎት ውስጥ አይካተትም.
እባክዎን የቻትቦትን የትብብር ሮቦት ለሚከተሉት ዓላማዎች አይጠቀሙ። - የሕክምና እና ሕይወት-ወሳኝ መተግበሪያዎች.
- ፍንዳታ ሊያስከትል በሚችል አካባቢ.
- ያለአደጋ ግምገማ በቀጥታ ጥቅም ላይ ይውላል.
- በቂ ያልሆነ የደህንነት ተግባር ደረጃዎች አጠቃቀም.
- የሮቦት አፈጻጸም መለኪያዎች ወጥነት የሌለው አጠቃቀም።
ስለዚህ መመሪያ ማንኛውም ጥያቄ ካለዎት እባክዎን ይጎብኙ እና አስተያየትዎን በሚከተለው ላይ ያቅርቡ፡-https://www.elephantrobotics.cn.
1.3 የአጠቃቀም ሁኔታዎች
ስለ ማይኮባዮታ
2.1 ዳራ
የ"Robots አለምን ተደሰት" የሚለውን ተልእኮ በማስደገፍ፣የዝሆን ሮቦቲክስ ማይኮባዮታ፣የአለም ትንሹ እና ቀላል የትብብር ሮቦትን ቀርፆ አብዛኛው የኢንዱስትሪ ሮቦቶችን ተግባራትን ይዞ እንዲቆይ አድርጓል። በታመቀ እና በሚያምር የኢንዱስትሪ ዲዛይን፣ ምርጥ እና ኃይለኛ አፈጻጸም እና ግዙፍ የሶፍትዌር እና የሃርድዌር ልማት ቦታ፣ myCobot በመተግበሪያ መስፋፋት ላይ ያልተገደበ እድሎች አሉት።
የ mycobiota የንድፍ ፕሮቶታይፕ በ2018 በዝሆን ሮቦት በቻይና የጀመረው ሁሉም-በአንድ ሮቦት ነው። በቻይና ውስጥ የመጀመሪያው የተቀናጀ የትብብር ሮቦት የ2019 CAIMRS የኢንዱስትሪ ሮቦት ፈጠራ ሽልማት እና የ2019 ከፍተኛ የቴክኖሎጂ ሮቦት አመታዊ “ፈጠራ አሸንፏል። ቴክኖሎጂ ዋርድ”፣ እንዲሁም በአገር ውስጥ እና በውጭ ላሉ ከ30 በላይ ሀገራት የተሸጠ ሲሆን ከአለም 500 ምርጥ ኢንተርፕራይዞች ፋብሪካዎች በአንድ ድምፅ ምስጋና እና እውቅና አግኝቷል።
2.2 መግቢያ
mycobiota የአለማችን ትንሹ እና ቀላል ባለ ስድስት ዘንግ የትብብር ሮቦት ነው፣ በዝሆን ሮቦቲክስ እና M5Stack በጋራ የተሰራ። በምናብ ከተሞላው ምርታማነት መሳሪያ በላይ፣ ግላዊ ማበጀትን ለማግኘት በተጠቃሚዎች ፍላጎት መሰረት ሁለተኛውን እድገት ማስቀጠል ይችላል።
በ 850 ግ ክብደት ፣ በ 250 ግ ጭነት ፣ እና በ 350 ሚሜ ክንዶች ርዝመት ፣ myCobot የታመቀ ግን ኃይለኛ ነው ፣ ከተለያዩ የመተግበሪያ ሁኔታዎች ጋር ለመላመድ ከተለያዩ የመጨረሻ ውጤቶች ጋር ሊዛመድ አይችልም እንዲሁም ሁለተኛውን እድገት ይደግፋል ባለብዙ ፕላትፎርም ሶፍትዌር እንደ ሳይንሳዊ ምርምር እና ትምህርት፣ ስማርት ቤት፣ ቀላል ኢንዱስትሪ እና የንግድ መተግበሪያዎች ያሉ የተለያዩ ሁኔታዎችን ፍላጎቶች ለማሟላት።
myCobot - መሰረታዊ መለኪያ
| የነፃነት ደረጃ | 6 |
| ጭነት | 250 ግ |
| የክንድ ስፋት | 350 ሚሜ |
| የሚሰራ ራዲየስ | 280 ሚሜ |
| ተደጋጋሚነት | ± 0.5 ሚሜ |
| ክብደት | 850 ግ |
| የኃይል ግቤት | 8V፣5A |
| የሥራ ሁኔታ | -5°~45° |
| ግንኙነት | የዩኤስቢ ዓይነት-ሲ |
2.3 ባህሪያት
- ልዩ የኢንዱስትሪ ዲዛይን እና እጅግ በጣም የታመቀ
mycobiota የተቀናጀ ሞጁል ዲዛይን ነው እና 850g ብቻ ይመዝናል ይህም ለመሸከም በጣም ቀላል ነው። የአጠቃላይ የሰውነት አወቃቀሩ ባነሰ መለዋወጫ የታመቀ ነው እና በፍጥነት ተነጣጥሎ ሊሰካ እና መጫወት ይችላል። - ከፍተኛ ውቅረት እና በ2 ስክሪኖች የታጠቁ
myCobot ፈጣን ምላሽ ያላቸው 6 ከፍተኛ አፈጻጸም ያላቸው ሰርቮ ሞተሮችን ይዟል፣ አነስተኛ ጉልበት ያለው እና ለስላሳ
ማዞር. አካሉ የተስፋፋውን አፕሊኬሽን ለማሳየት የፆመ ቤተ-መጽሐፍትን የሚደግፉ 2 ማሳያ ስክሪን ይይዛል
ትእይንት ይበልጥ ቀላል እና ግልጽ። - Lego Connector እና በሺዎች የሚቆጠሩ M5STACK ኢኮሎጂካል መተግበሪያ
የ mycobiota መሠረት እና መጨረሻ ከሌጎ ማገናኛ ጋር የተገጠመላቸው ሲሆን ይህም ለተለያዩ ጥቃቅን የተገጠሙ መሳሪያዎችን ለማልማት ተስማሚ ነው. የእሱ መሰረት በ M5STACK Basic ቁጥጥር ስር ነው, እና በሺዎች የሚቆጠሩ የመተግበሪያ ጉዳዮችን በቀጥታ መጠቀም ይቻላል. - እገዳ ፕሮግራሚንግ እና የኢንዱስትሪ ROS ደጋፊ
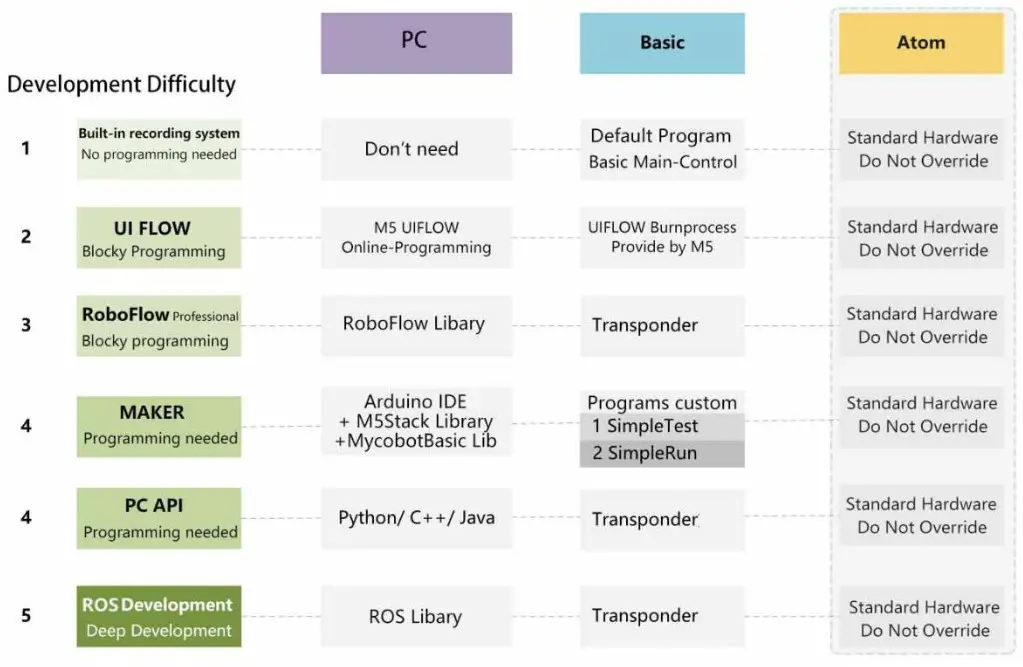
UIFlow ቪዥዋል ፕሮግራሚንግ ሶፍትዌርን በመጠቀም የእኔን ሮቦት ፕሮግራም ማድረግ ለሁሉም ሰው ቀላል እና ቀላል ነው።
እንዲሁም RoboFlowን መጠቀም ይችላሉ, ከዝሆን ሮቦቲክስ የመጡ የኢንዱስትሪ ሮቦቶች ሶፍትዌር, በርካታ ተግባራዊ ሞጁሎችን Arduino + ROS ክፍት ምንጭ ስርዓትን ይደግፋል. - መቅዳትን ይከታተሉ እና በእጅ ይማሩ
ተለምዷዊ የነጥብ ቆጣቢ ሁነታን ያስወግዱ፣ myCobot የተቀመጠውን ትራክ ለመቅዳት የድራግ ሙከራን ይደግፋል እና እስከ 60 ደቂቃ የሚደርሱ የተለያዩ ትራኮችን መቆጠብ ለአዳዲስ ተጫዋቾች መማር ቀላል እና አስደሳች ያደርገዋል።
2.4 የባለቤትነት መብቶች
ስለ ሮቦት ተዛማጅ የፈጠራ ባለቤትነት ማረጋገጫዎች
|
አይ። |
የምስክር ወረቀት ቁጥር. | የፈጠራ ባለቤትነት ስም | የፈጠራ ባለቤትነት ቁጥር. |
የፈጠራ ባለቤትነት |
| 1 | ቁጥር 8194138 | የሜካኒካል ክንድ ትስስር እና የሜካኒካል ክንድ | ZL 2018 20017484.4 | ዝሆን ሮቦቲክስ |
| 2 | ቁጥር 8186088 | የሜካኒካል ክንድ መገጣጠሚያ አያያዥ እና የሜካኒካል ክንድ | ZL 2017 21700594.2 | ዝሆን ሮቦቲክስ |
| አይ። | ምርት | የፈጠራ ባለቤትነት ዓይነት | ርዕስ |
የፈጠራ ባለቤትነት ቁጥር. |
| 1 | ቀላል ክብደት ያለው ሮቦት ክንድ | መልክ የፈጠራ ባለቤትነት | የጋራ ሮቦት ክንድ | 2020030683471.3 |
|
አይ። |
የፈጠራ ርዕስ |
የማመልከቻ ቁጥር |
| 1 | የሮቦት አቀማመጥን ለመጠበቅ ፣ ለመጎተት እና ለማስተማር ዘዴ እና ስርዓት | ZL 2018 1 1634649.3 |
| 2 | በሞመንተም ሞዴል ላይ የተመሰረተ ሮቦት የመስመር ላይ ግጭት ማወቂያ ዘዴ እና ስርዓት | ZL 2019 1 0030748.9 |
| 3 | ከጋራ አንግል ማጣደፍ ነጻ የሆነ የሮቦት ተለዋዋጭ መለኪያ መለያ ዘዴ | ZL 2019 1 0773865.4 |
ሃርድዌር
3.1 ተቆጣጣሪ እና አንቀሳቃሽ
3.1.1 M5STACK መሰረታዊ ዋና መቆጣጠሪያ
M5STACK መሰረታዊ ኪትልክ እንደ ስሙ፣ በM5STACK ልማት ኪት ተከታታዮች መካከል የጀማሪ ኪት ነው።
በESP-32 ኮር የተጎለበተ ሞዱላር፣ተደራራቢ፣ሚዛን እና ተንቀሳቃሽ መሳሪያ ነው፣ይህም ክፍት-ምንጭ፣ዝቅተኛ ወጪ፣ሙሉ ተግባር እና ለገንቢዎች በሁሉም s ላይ አዲስ የምርት እድገትን እንዲይዙ ቀላል ያደርገዋል።tagየወረዳ ዲዛይን፣ ፒሲቢ ዲዛይን፣ ሶፍትዌር፣ የሻጋታ ዲዛይን እና ምርትን ጨምሮ። ይህ መሰረታዊ ኪት ወዳጃዊ ዋጋ እና ሙሉ-ተለይተው የቀረቡ ሃብቶችን ያቀርባል ይህም አይኦትን እንዲያስሱ ጥሩ ጀማሪ ያደርግልዎታል።
በጣም ፈጣኑን የአይኦቲ ፕሮቶታይፕ መንገድ ማሰስ ከፈለጉ የM5STACK ልማት ቦርድ ፍፁም መፍትሄ ነው። እንደሌሎች ሳይሆን የM5STACK ልማት ቦርድ በጣም ቀልጣፋ ነው፣ በኢንዱስትሪ ደረጃ መያዣ እና በESP32 ላይ የተመሰረተ የእድገት ቦርድ ተሸፍኗል። ከWi-Fi እና ብሉቱዝ ሞጁሎች ጋር ይዋሃዳል እና ባለሁለት ኮር እና 16ሜባ የ SPI ፍላሽ ይዟል። ከ30+ M5Stack የሚቆለሉ ሞጁሎች፣ 40+ ሊራዘም የሚችል ክፍሎች እና የተለያዩ የፕሮግራም ቋንቋ ደረጃዎች ጋር በመሆን የአይኦቲ ምርትዎን በአጭር ጊዜ ውስጥ መፍጠር እና ማረጋገጥ ይችላሉ።
ደጋፊ የእድገት መድረኮች እና የፕሮግራም አወጣጥ ቋንቋዎች፡ አርዱዪኖ፣ Blocky ቋንቋ ከ UIFlow፣ ማይክሮፒቶን። ምንም አይነት የፕሮግራም አወጣጥ ክህሎት ደረጃ ቢኖረዎትም፣ M5STACK ሃሳብዎን እውን ለማድረግ እና ወደ መጨረሻው ምርታማነት ለመድረስ በእያንዳንዱ እርምጃ ይመራዎታል። በESP8266 የተጫወቱ ከሆነ፣ ESP32 ከESP8266 ፍጹም የሆነ ማሻሻያ መሆኑን ይገነዘባሉ። በንጽጽር፣ ESP32 ብዙ GPIOዎች፣ ተጨማሪ የአናሎግ ግብአቶች፣ ሁለት የአናሎግ ውጤቶች፣ በርካታ ተጨማሪ ተጓዳኝ አካላት (እንደ መለዋወጫ UART) አሉት። ይፋዊ መድረክ ESP-IDF በFreeRTOS ተተክሏል። በባለሁለት ኮር እና በእውነተኛ ጊዜ ስርዓተ ክወና፣ የበለጠ የተደራጀ ኮድ እና በጣም ከፍተኛ ፍጥነት ያለው ፕሮሰሰር ማግኘት ይችላሉ።
M5STACK መሰረታዊ ሁለት ሊነጣጠሉ የሚችሉ ክፍሎችን ያቀፈ ነው። ወደላይ ያለው ክፍል ሁሉም አይነት ፕሮሰሰር፣ቺፕስ እና አንዳንድ ሌሎች የቁልፍ ክፍሎች አሉት። M-BUS ሶኬት፣ እና ሊራዘም የሚችል ፒን በሁለቱም በኩል።
3.1.1.1 የምርት ባህሪያት
- ESP32 ላይ የተመሠረተ
- አብሮ የተሰራ ድምጽ ማጉያ፣ አዝራሮች፣ የቀለም LCD፣ የኃይል/ዳግም ማስጀመሪያ ቁልፍ
- TF ካርድ ማስገቢያ (16ጂ ከፍተኛ መጠን)
- በጀርባው ላይ መግነጢሳዊ መሳብ
- ሊራዘም የሚችል ፒኖች እና ቀዳዳዎች
- ኤም-አውቶቡስ ሶኬት እና ፒኖች
- የፕሮግራም መድረክ: UIFlow, MicroPython, Arduino
3.1.1.2 ልኬት
| መርጃዎች | መለኪያ |
| ESP32-D0WDQ6 | 240ሜኸ ባለሁለት ኮር፣ 600 DMIPS፣ 520KB SRAM፣ Wi-Fi፣ ባለሁለት ሁነታ ብሉቱዝ |
| ብልጭታ | 16 ሜባ |
| የኃይል ግቤት | 5V @ 500mA |
| ወደብ | ዓይነትC x 1፣ GROVE(I2C+I/0+UART) x 1 |
| ኮር የታችኛው ወደብ | ፒን (G1፣ G2፣ G3፣ G16፣ G17፣ G18፣ G19፣ G21፣ G22፣ G23፣ G25፣ G26፣ G35፣ G36) |
| የአይፒኤስ ማያ ገጽ | 2 ኢንች፣ 320×240 ባለቀለም TFT LCD፣ ILI9342C፣ Brightness853nit |
| ተናጋሪ | 1 ዋ-0928 |
| አዝራር | ብጁ አዝራር x 3 |
| አንቴና | 2.4G 3D አንቴና |
| የአሠራር ሙቀት | 32°F እስከ 104°F (0°C እስከ 40°ሴ) |
| የተጣራ ክብደት | 47.2 ግ |
| አጠቃላይ ክብደት | 93 ግ |
| የምርት መጠን | 54 x 54 x 18 ሚሜ |
| የጥቅል መጠን | 95 x 65 x 25 ሚሜ |
| የጉዳይ ቁሳቁስ | ፕላስቲክ (ፒሲ) |
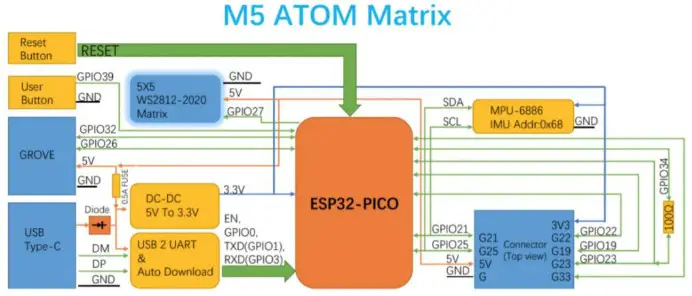
3.1.2 M5STACK አቶም
24*24ሚሜ ብቻ መጠን ያለው ATOM ማትሪክስ በM5Stack ልማት ኪት ተከታታይ ውስጥ በጣም የታመቀ የእድገት ሰሌዳ ነው። ተጨማሪ የ GPIO ፒን ያቀርባል እና ለቀላል እና ለጥቃቅን የተከተተ መሳሪያ ልማት በጣም ተስማሚ ነው።
ዋናው መቆጣጠሪያው ከWi-Fi እና ብሉቱዝ ቴክኖሎጂዎች ጋር የተቀናጀ እና 32MB የተቀናጀ የ SPI ፍላሽ ማህደረ ትውስታ ያለው ESP4-PICO-D4 ቺፕ ይቀበላል። የአቶም ሰሌዳው የኢንፍራሬድ ኤልኢድን ከ5 * 5 RGB LED ማትሪክስ በፓነሉ ላይ፣ አብሮ የተሰራ IMU ዳሳሽ (MPU6886) እና የHY2.0 በይነገጽ ያቀርባል። ተጠቃሚዎች በተለያዩ ፕሮጀክቶቻቸው ላይ የግብአት ድጋፍ እንዲጨምሩ ለማስቻል ከ RGB Led ማትሪክስ በታች አጠቃላይ ዓላማ ያለው ፕሮግራም ሊደረግ የሚችል ቁልፍ ቀርቧል። የቦርድ ዩኤስቢ በይነገጽ (አይነት-ሲ) ፈጣን ፕሮግራሞችን መጫን እና መፈጸምን ያስችላል። ቦርዱን ለመትከል አንድ M2 ሽክርክሪት ቀዳዳ በጀርባው ላይ ይቀርባል.
ማስታወሻ፡- ማኒፑሌተሩን በሚጠቀሙበት ጊዜ፣ እባክዎ በማኒፑሌተሩ መጨረሻ ላይ ፈርሙዌሩን ወደ ATOM ከማቃጠል ይቆጠቡ። መሣሪያው የእኛን ኦርጅናል firmware ብቻ ነው የሚደግፈው።
እባኮትን በደግነት ተረዱ።
3.1.2.1 ባህሪያት
- ESP32 PICO ላይ የተመሠረተ
- ሊሠራ የሚችል አዝራር
- 5*5 RGB LED ማትሪክስ ፓነል (WS2812C)
- አብሮ የተሰራ የኢንፍራ-ቀይ LED
- አብሮ የተሰራ MPU6886 Inertial ዳሳሽ
- ሊራዘም የሚችል ፒኖች እና ቀዳዳዎች
- የፕሮግራም መድረክ: Arduino UIFlow
3.1.2.2 ዝርዝር መግለጫ
| መርጃዎች | መለኪያ |
| ESP32 | 240ሜኸ ባለሁለት ኮር፣ 600 DMIPS፣ 520KB SRAM፣ Wi-Fi፣ ባለሁለት ሁነታ ብሉቱዝ |
| ብልጭታ | 4 ሜባ |
| የኃይል ግቤት | 5V @ 500mA |
| ወደብ | ዓይነትC x 1፣ GROVE(I2C+I/0+UART) x 1 |
| የፒን በይነገጽ | G19፣ G21፣ G22፣ G23፣ G25፣ G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | የኢንፍራሬድ ማስተላለፊያ |
| አዝራር | ብጁ የታችኛው x 1 |
| አንቴና | 2.4G 3D አንቴና |
| የአሠራር ሙቀት | 32°F እስከ 104°F (0°C እስከ 40°ሴ) |
| የተጣራ ክብደት | 3g |
| አጠቃላይ ክብደት | 14 ግ |
| የምርት መጠን | 24 x 24 x 14 ሚ.ሜ |
| የጥቅል መጠን | 24 x 24 x 14 ሚ.ሜ |
| የጉዳይ ቁሳቁስ | ፕላስቲክ (ፒሲ) |
3.1.3 Servo ሞተር
myCobot ከአድቫን ጋር በ6 መገጣጠሚያዎች ውስጥ 6 ከፍተኛ አፈጻጸም ያላቸውን ሰርቮስ ሰርቪስ ያካፍላልtagፈጣን ምላሽ ፣ ትንሽ መነቃቃት ፣ ለስላሳ ሽክርክሪት ፣ የተረጋጋ ጉልበት ፣ ወዘተ.
| መርጃዎች | መለኪያ |
| መጠን | 23.2*12.1*28.5ሚሜ |
| የኃይል ግቤት | 4.8 ~ 7.4 ቪ |
| የአሠራር ሙቀት | -15 ~ 70 ° |
| ደረጃ የተሰጠው ጉልበት | 1.5kg.cm@6V |
| ድንክ torque | 4.5kg.cm@6V |
| የማዞሪያ አንግል | 300° (አንግል በሶፍትዌር ሊገደብ ይችላል) |
3.2 ሜካኒካል መዋቅር
3.2.1 መጠን እና የስራ ክልል
ሀ) ማይኮባዮታ
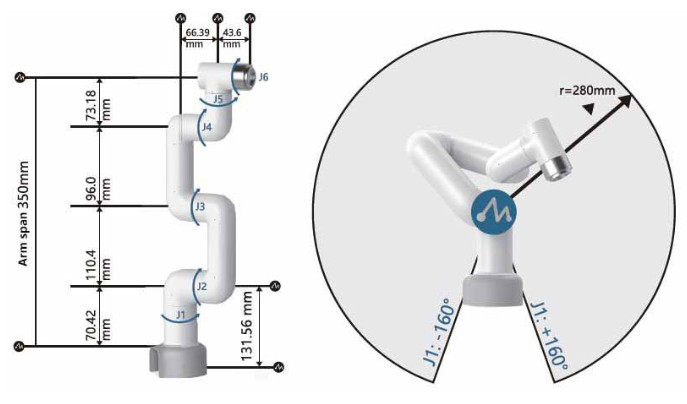
myCobot -የእንቅስቃሴ የጋራ ክልል ሰንጠረዥ
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |
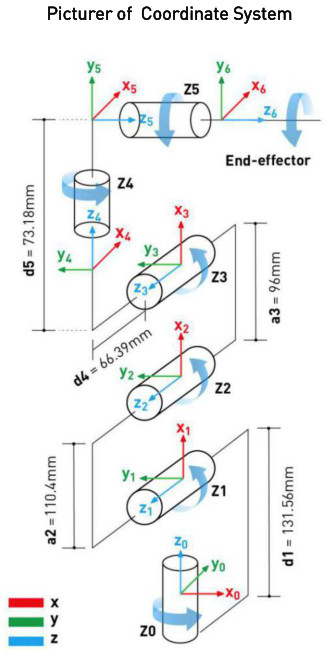
የማስተባበር ሥርዓት ሥዕል
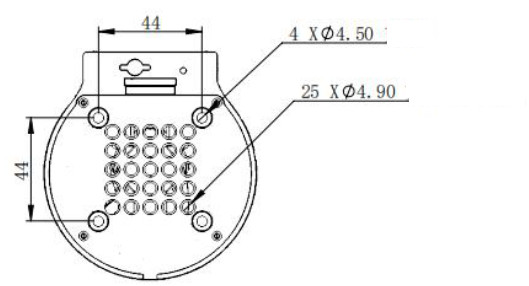
ለ) የመሠረት ስብስብ
መሰረቱ ከሁለቱም የሌጎ-ቴክ አካላት ቀዳዳዎች እና ከቀዳዳው ሾጣጣ ቀዳዳዎች ጋር ተኳሃኝ ነው።
ሐ) ማጠናቀቂያ ስብሰባ
መጨረሻው ከሁለቱም የሌጎ-ቴክ አካል ቀዳዳ እና ከስፒል ክር ጋር ይጣጣማል.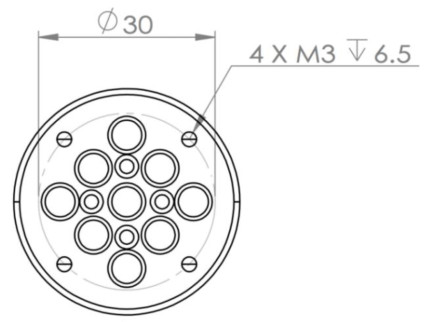
3.2.2 ማሸግ እና መጫን
3.2.2.1 ማሸግ
ማስታወሻ፡- የማሸጊያ ሳጥኑ ከተቀመጠ በኋላ፣ እባክዎ የሮቦት ማሸጊያው ያልተበላሸ እና ያልተበላሸ መሆኑን ያረጋግጡ። ማንኛውም ጉዳት ካለ እባክዎን የሎጂስቲክስ ኩባንያውን እና የአካባቢውን አቅራቢ በወቅቱ ያነጋግሩ። ከማሸግ በኋላ፣ እባክዎን በእቃው ዝርዝር መሰረት በሳጥኑ ውስጥ ያሉትን ትክክለኛ እቃዎች ያረጋግጡ።

| myCobot【መደበኛ ስብስብ】 | - myCobot-280 - ብሮሹር -ገቢ ኤሌክትሪክ - የዩኤስቢ ዓይነት ሲ - ጃምፐር -M4 * 35 ፣ አይዝጌ ብረት ስፒር - ባለ ስድስት ጎን ቁልፍ |
እባኮትን የሮቦት ሲስተም በሠንጠረዡ ላይ የተገለጹትን ሁኔታዎች በሚያሟሉበት አካባቢ ይጫኑት እና የማሽኑን አፈፃፀም ለመጠበቅ እና ደህንነቱ በተጠበቀ ሁኔታ ይጠቀሙበት።
የክወና አካባቢ እና ሁኔታዎች
| የሙቀት መጠን | -10℃~45℃ |
| አንጻራዊ እርጥበት | 20% ~ 70% |
| የቤት ውስጥ / ከቤት ውጭ | የቤት ውስጥ |
| ሌላ የአካባቢ መስፈርቶች | - የፀሐይ ብርሃንን ያስወግዱ. - ከአቧራ ፣ ከዘይት ጢስ ፣ ከጨው ፣ ከብረት ፋይበር ፣ ወዘተ. - ከሚቃጠሉ እና ከሚበላሹ ፈሳሾች እና ጋዞች ይራቁ። - ከውሃ ጋር አይገናኙ. - ድንጋጤ ፣ ንዝረት ፣ ወዘተ አያስተላልፍም። - ከጠንካራ የኤሌክትሮማግኔቲክ ጣልቃገብ ምንጮች ይራቁ። |
3.2.2.2 መጫን
ትክክለኛው የ mycobiota የትብብር ሮቦት ክብደት 850 ግራም ነው። የሮቦትን እንቅስቃሴ ግምት ውስጥ በማስገባት, ሮቦቱ በሚንቀሳቀስበት ጊዜ የስበት ማእከል ይንቀሳቀሳል. ስለዚህ, ሮቦቱ በመደበኛነት ጥቅም ላይ እንዲውል በጠንካራ መሠረት ላይ ማስተካከል ያስፈልጋል.
የሮቦት መሠረት የበይነገጽ መጠን፡ የፔዴስታል መጠገኛ ቀዳዳ ሮቦቱን ወደ ሌሎች መሠረቶች ወይም አውሮፕላኖች የሚያስተካክለው በይነገጽ ነው። የተወሰነው ቀዳዳ መጠን እንደሚከተለው ይታያል. በ 4 ሚሜ ዲያሜትር በ 4.5 ቀዳዳዎች በኩል በ M4 ቦዮች ሊስተካከል ይችላል.
ከመጫንዎ በፊት በቋሚው መሠረት ላይ ተጓዳኝ ክር ቀዳዳ መኖሩን ያረጋግጡ. በይፋ ከመጫንዎ በፊት እባክዎን ያረጋግጡ፡-
- የሚጫነው አካባቢ ከላይ ያሉትን መስፈርቶች ያሟላል.
- የመጫኛ ቦታው ከሮቦት የስራ ክልል ያነሰ አይደለም, እና በቂ ቦታ አለ
ለመጫን, ለመጠቀም, ለመጠገን እና ለመጠገን. - መቆሚያውን በተገቢው ቦታ ያስቀምጡት.
- ከመጫን ጋር የተያያዙ መሳሪያዎች እንደ ዊንች, ዊንች, ወዘተ የመሳሰሉ ዝግጁ ናቸው.
ከላይ የተጠቀሱትን ካረጋገጡ በኋላ, ሮቦቱን ወደ መሰረቱ መጫኛ ቦታ ያንቀሳቅሱት, የሮቦቱን አቀማመጥ ያስተካክሉት እና የሮቦትን መሰረትን የመጠገጃ ቀዳዳ ከመሠረቱ ላይ ባለው ቀዳዳ ላይ ካለው ቀዳዳ ጋር ያስተካክሉት.
ማስታወሻ፡- በመትከያው ላይ ያለውን የሮቦቱን አቀማመጥ በሚያስተካክሉበት ጊዜ, እባኮትን ለማስወገድ ሮቦቱን በቀጥታ በጣቢያው መጫኛ ቦታ ላይ ከመግፋት ይቆጠቡ. ሮቦቱን በእጅ በሚያንቀሳቅሱበት ጊዜ፣ እባክዎን በሮቦት ላይ አላስፈላጊ ጉዳት እንዳይደርስ ለመከላከል የውጭ ሃይልን ደካማ በሆነው የሮቦት አካል ላይ ከመተግበር ለመዳን ይሞክሩ።
3.3 ኤሌክትሮኒክስ እና ኤሌክትሪክ
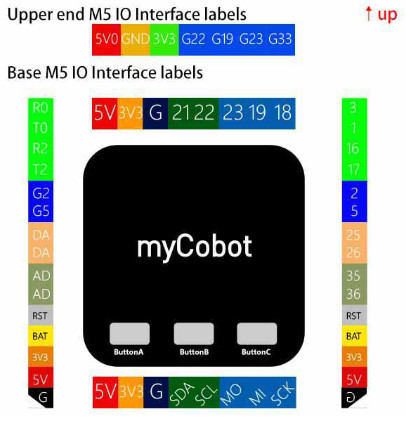
myCobot ሶስት ውጫዊ ተርሚናሎች አሉት። እነሱ በመሠረቱ ላይ የ M5Stack Basic ውጫዊ ተርሚናሎች፣ ከኃይል ሶኬት አጠገብ ያሉት ሁለቱ ግሮቭ ተርሚናሎች እና የ M5Stack Atom J6 መገጣጠሚያ ውጫዊ ተርሚናል ፒን ናቸው።
a) M5STACK መሰረታዊ የኤሌክትሪክ ንድፍ

b) M5STACK አቶም የወረዳ ዲያግራም
ሐ) IO በይነገጽ ንድፍ
ሶፍትዌር
ለሶፍትዌር ዝመናዎች፣ እባክዎ መጀመሪያ የእኛን Github ይመልከቱ። https://github.com/elephantrobotics/myCobot
4.1 የጽኑዌር ማሻሻያ እና መልሶ ማግኛ - የእኔ ስቱዲዮ
የእኔ ስቱዲዮ ለሮቦቴ/ማይኮባዮታ ሮቦቶች የአንድ ጊዜ ማቆሚያ መድረክ ነው።
የእኔ ስቱዲዮ ዋና ተግባራት 1) firmware ን ያዘምኑ; 2) ሮቦትን እንዴት መጠቀም እንደሚቻል የቪዲዮ ትምህርቶችን ያቅርቡ; 3) የጥገና እና የጥገና መረጃን (እንደ የቪዲዮ ትምህርቶች ፣ ጥያቄ እና መልስ ፣ ወዘተ) ያቅርቡ።
ስለ myStudio የዩቲዩብ ቪዲዮዎች አገናኝ፡- https://youtu.be/Kr9i62ZPf4w
የእርስዎን mycobiota ማሻሻል ወይም ማቆየት ከፈለጉ፣ የልማት አካባቢው መዘጋጀቱን ያረጋግጡ። ካልሆነ እባክዎ መጀመሪያ የመለያ ወደብ ነጂውን ይጫኑ እና ከዚያ ሶፍትዌሩን ለመጠቀም ይሞክሩ። የማውረጃው ሊንክ እንደሚከተለው ነው።
ኦፊሴላዊ webጣቢያ፡ https://www.elephantrobotics.com/myCobot/
Github፡ https://github.com/elephantrobotics/MyStudio/
የዊንዶውስ ሲስተም የሚጠቀሙ ከሆነ ለማውረድ እባኮትን “my studio-windows.exe” ን ይምረጡ እና ከዚያ ወደ ፕሮጄክት አቃፊዎ ውስጥ ዚፕ ይክፈቱት። ውስብስብ በሆኑ መንገዶች እንዳይጠቀሙበት ይጠንቀቁ, ይህም በማይታወቁ መንገዶች ላይ ወደ ችግር ሊመራ ይችላል.
የእድገት አካባቢዎ አስቀድሞ ከተዘጋጀ, በቀጥታ መክፈት ይችላሉ file "ማይኮቦት. exe"
ከተከፈተ በኋላ, በይነገጹ እንደሚከተለው ነው.
የእርስዎን ማይኮቦት በ"መሰረታዊ" ወይም "አቶም" ያገናኙ፣"ቋንቋ"ን ይምረጡ እና በመቀጠል "አገናኝ"ን ጠቅ ያድርጉ ወደ ዋናው በይነገጽ ከዚህ በታች ይታያል።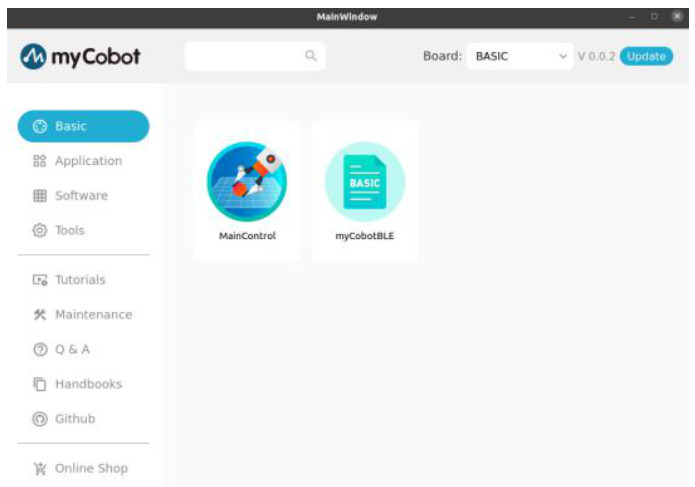
ሁለቱንም Basic እና Atom ካገናኙ በላይኛው ቀኝ ጥግ ላይ በሚገኘው የቦርድ አሞሌ ላይ እንደገና ማቃጠል የሚፈልጉትን ሶፍትዌር ይምረጡ እና ከዚያ ማቃጠል የሚፈልጉትን firmware ለመምረጥ Basic ወይም Tools የሚለውን ይጫኑ።
4.2 አብሮ የተሰራ የትራክ ቀረጻ
M5STACK መሰረታዊ የዋና መቆጣጠሪያ ሰሌዳ ብጁ ፕሮግራሚንግ እና ዳታ መፃፍን የሚደግፉ 3 አዝራሮች አሉት። ይህ ፕሮግራም ክፍት ምንጭ ነው፣ የእኛን GitHub መመልከት ይችላሉ።
የማስተማር ማሳያን ይጎትቱ
- ቀረጻ: ወደ ቀረጻ ሁነታ ከገቡ በኋላ, የመቅጃ ማከማቻ ቦታን ይምረጡ

አዝራር A፡ ወደ ራም ያከማቹ
አዝራር ለ፡ ወደ ማህደረ ትውስታ ካርድ ማከማቻ
አዝራር ሐ፡ ከቀረጻ ሁነታ ውጣ - መቅዳት ጀምር

የማጠራቀሚያውን ቦታ ከመረጡ በኋላ, የታለመውን እርምጃ ለማጠናቀቅ የሮቦቲክ ክንድ እራስዎ ይጎትቱ, ከዚያም እርምጃው ይመዘገባል እና ይከማቻል. - ይጫወቱ

አዝራር ሀ፡ የተቀዳውን ድርጊት ማጫወት ጀምር
አዝራር ለ፡ ለአፍታ አቁም
አዝራር ሐ፡ መልሶ ማጫወትን ውጣ
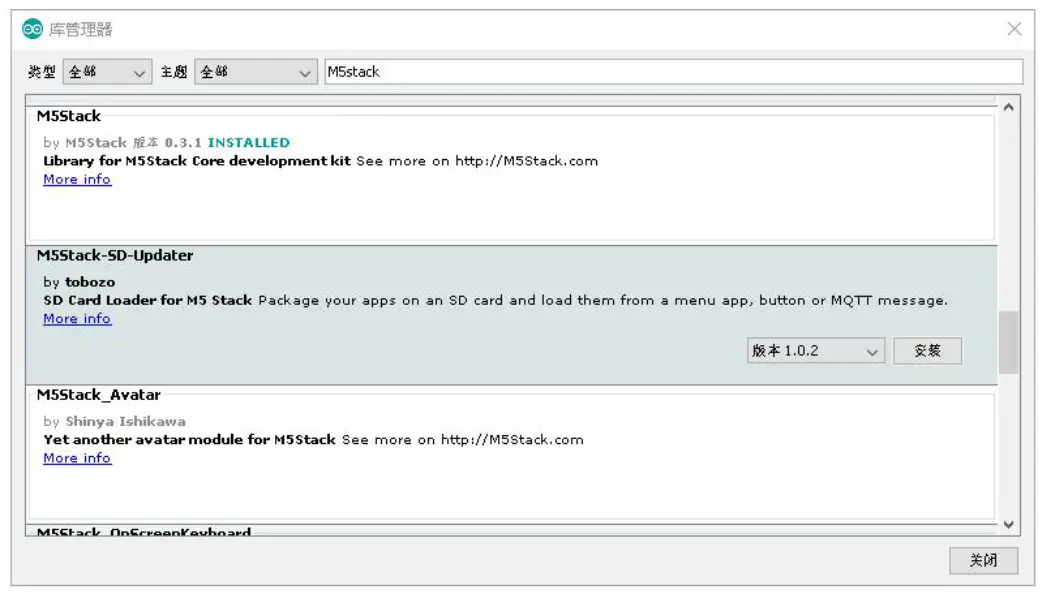
4.3 Arduino ቤተ መጻሕፍት
ቤተ-መጽሐፍት በቀላሉ ማገናኘት እና ሴንሰሮችን፣ ማሳያዎችን፣ ሞጁሎችን ወዘተ ለመጠቀም የሚያስችል የኮዶች ስብስብ ነው።ampለ, አብሮ የተሰራው LiquidCrystal ቤተ-መጽሐፍት ከቁምፊ LCD ማሳያዎች ጋር ቀላል ግንኙነትን መገንዘብ ይችላል።
ቤተ መፃህፍቱን በሚጠቀሙበት ጊዜ የ Arduino ልማት ቦርድ ተግባራት ሊሰፉ ይችላሉ. በቤተ መፃህፍቱ ምክንያት፣ በአርዱዪኖ እና በውጫዊ ሃርድዌር ወይም በዳታ ግንኙነት መካከል ያለውን ትብብር በቀላሉ መገንዘብ እንችላለን። Arduino IDE በተከታታይ መደበኛ ቤተ-መጽሐፍት ቀድሞ ተጭኗል fileኤስ. በተመሳሳይ ጊዜ የሶስተኛ ወገን ቤተ-ፍርግሞችን (እንደ ከኢንተርኔት የወረዱ የክፍት ምንጭ ቤተ-መጻሕፍት ያሉ) ወደ Arduino IDE መጫን እና ማስመጣት ይችላሉ። ቤተመጻሕፍትን መፍጠር እና ወደ Arduino IDE ማስመጣት ትችላለህ። የቤተ መፃህፍቱ መኖር ተጠቃሚዎች እንደ መዝገቦች እና የአድራሻ ጠቋሚዎች ያሉ ልዩ ይዘቶችን እንዲያልፉ ይረዳል, ይህም የእድገት ችግርን በእጅጉ ይቀንሳል. ለ ARDUINO IDE ጭነት የሶስተኛ ወገን ቤተ-መጽሐፍት እንዴት እንደሚታከሉ ማወቅ ከፈለጉ እባክዎን የአሽከርካሪው መጫኛ አድራሻ እና ዘዴ ይመልከቱ፡- https://docs.m5stack.com/#/zh_CN/arduino/arduino_development ለበለጠ መረጃ የእኛን Github መመልከት ይችላሉ። https://github.com/elephantrobotics/myCobot
ለበለጠ መረጃ የእኛን Github መመልከት ይችላሉ። https://github.com/elephantrobotics/myCobot
እንደሚከተለው።
4.4 API በይነገጽ እና ግንኙነት
- UNIFLOW
- አርዱዪኖ
- ማይክሮ ፓይቶን
- FreeROTS
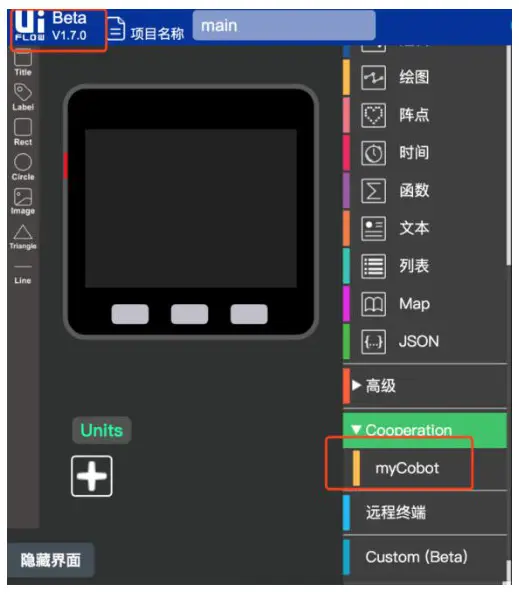
4.4.1 UIFlow
UIFlow ቤታ ሥሪትን ተጠቀም እና ትብብርን ምረጥ - mycobiota
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython
 4.5 ROS
4.5 ROS
ROS በሂደት ላይ ነው እና በሂደቱ መሰረት ይሻሻላል።
ከ 12.31፡XNUMX ጀምሮ፡-
- Python2 ወይም 3 አሁኑን መጫን እንዲችሉ የ ROS ዝግጅትን አዘምኗል።
- በምትኩ ወደ ተከታታይ ወደብ ለመግባት ቀይር፣ ስለዚህ የዊንዶውስ ተጠቃሚዎች በቀጥታ መስራት ይችላሉ።
- በኤፒአይ ቤተ መፃህፍት ውስጥ አዲሱን የበይነገጽ ዝርዝር ሰነድ ያዘምኑ፣ እባክዎን «README»ን ይፈልጉ።
- 4.6 የጋራ መለኪያ
የእርስዎ ሞቦት መገጣጠሚያዎችን ማስተካከል ከፈለገ፣ እባክዎ መጀመሪያ Calibrationን ለማቃጠል የ mycobiota ወይም Arduino firmware እና ሌሎች መሳሪያዎችን ይጠቀሙ።
firmware ን ከሰቀሉ በኋላ መሰረታዊ በይነገጽ ከዚህ በታች ይታያል።
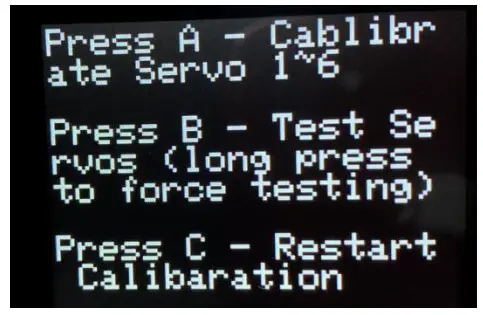
በዚህ ጊዜ J1 ን ከግንዱ ጋር በማስተካከል ወደ መደበኛው ዜሮ ቦታ ያሽከርክሩት እና የ A ቁልፍን (የግራውን ቁልፍ) ይጫኑ ፣ ከዚያ J1 ከተለዋዋጭ እንቅስቃሴ ወደ የማይንቀሳቀስ ቦታ ይሄዳል እና በዚህ መደበኛ ዜሮ ቦታ ላይ ይስተካከላል።
ቀሪውን J2-J6 ለማዘጋጀት ከዚህ ዘዴ በኋላ ያሉትን እርምጃዎች ይድገሙ። J6 ከተዘጋጀ በኋላ ሁሉንም መቼቶች ለማስቀመጥ የ A ቁልፉን (የግራ ቁልፉን) እንደገና ይጫኑ።
ሁሉም መገጣጠሚያዎች ወደ መደበኛው ዜሮ ቦታ ሲመለሱ፣ myCobot በመደበኛነት መስራት ይችል እንደሆነ ማረጋገጥ ያስፈልግዎታል። የ B አዝራሩን (የመሃል አዝራሩን) ይጫኑ፣ ከዚያ የእኔ ሮቦት ከ J1 እስከ J6 ን በቅደም ተከተል ያገኛል።
በሙከራ ጊዜ በመሳሪያዎች እና በሰራተኞች ላይ ጉዳት እንዳይደርስ ለመከላከል እባክዎ በሚሰራበት ክልል ውስጥ ምንም አይነት እንቅፋት ወይም የሰራተኞች ጣልቃገብነት አለመኖሩን ያረጋግጡ።
ቪዥዋል ፕሮግራሚንግ እና የኢንዱስትሪ ሶፍትዌር
5.1 ቪዥዋል ፕሮግራሚንግ ሶፍትዌር-UIFlow
ለዝርዝር አጠቃቀም፣ እባክዎ የUI Flow ኦፕሬሽን መመሪያን ከታች ካለው ማገናኛ ያግኙ።
M5STACK መሰረታዊ፡ https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_ማይክሮ ፒቶን
M5STACK አቶም፡- https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
5.2 የኢንዱስትሪ እይታ ፕሮግራሚንግ ሶፍትዌር-RoboFlow
myCobot በ Elephant Robotics የኢንዱስትሪ ትብብር ሮቦቶች የሚሠራውን RoboFlowን ይደግፋል። የRoboFlow የስራ ሂደት ቀላል እና ለአጠቃቀም ቀላል ሲሆን በይነተገናኝ በይነገጹ ግልጽ እና ለመረዳት የሚያስቸግር ሲሆን ይህም ለተጠቃሚዎች በፍጥነት ለመቆጣጠር እና ለመጠቀም ምቹ እና ተጠቃሚዎች ኦፕሬሽኖችን እና ፕሮግራሞችን በብቃት እንዲያጠናቅቁ ይረዳል። ጀማሪ ተጠቃሚዎች እንኳን በቀላል አሠራሮች የታለሙ ተግባራትን ማሳካት ይችላሉ።
ለዝርዝር አጠቃቀም፣ እባክዎን የRoboFlow ኦፕሬሽን መመሪያን ከታች ካለው ማገናኛ ያግኙ።
https://www.elephantrobotics.com/wpcontent/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%
89%8B%E5%86%8C-CN.pdf
ከሽያጭ በኋላ አገልግሎት
- የመመለሻ አገልግሎት የምርቶቹ ሎጅስቲክስ ከደረሰው ቀን በኋላ ባሉት 7 ቀናት ውስጥ ላልተከፈቱ ዕቃዎች የተገደበ ነው። በምላሹ ያጋጠሙትን ጭነት ወይም ሌሎች አደጋዎች በደንበኛው መሸከም አለባቸው።
- ደንበኞች ዋስትና በሚጠየቁበት ጊዜ የግዢ ደረሰኝ እና የዋስትና ካርዱን እንደ የዋስትና ማረጋገጫ ማቅረብ አለባቸው።
- የዝሆን ሮቦቲክስ በዋስትና ጊዜ ውስጥ በመደበኛ አጠቃቀም ምክንያት ለሚመጡት ምርቶች የሃርድዌር ጉድለቶች ተጠያቂ ይሆናል።
- የዋስትና ጊዜው የሚጀምረው ከተገዛበት ቀን ወይም ከሎጂስቲክስ ደረሰኝ ቀን ጀምሮ ነው.
- ከምርቶቹ ውስጥ ያሉ የተበላሹ ክፍሎች የዝሆን ሮቦቲክስ ባለቤትነት ይኖራቸዋል, እና አስፈላጊ ከሆነ ተገቢውን ወጪ ይከፍላል.
ለዋስትና አገልግሎት ማመልከት ከፈለጉ እባክዎን ዝርዝር መረጃውን ለማረጋገጥ በመጀመሪያ የደንበኛ አገልግሎታችንን ያግኙ። የሚከተለው የዝርዝር አካላት የዋስትና ውል ነው።
ማስታወሻ፡- ከምርት ብሮሹር ጋር ግጭት ካለ የተጠቃሚ መመሪያው ያሸንፋል።
ሀ) ሴቨር ሞተር
| የዋስትና ጊዜ | የዋስትና አገልግሎቶች |
| ≤1 ወር | የዝሆን ሮቦቲክስ ነፃ አዲስ ሴቨር ሞተር ያቀርባል እና ጭነቱን ይሸከማል። |
| 1-3 ወራት | የዝሆን ሮቦቲክስ ነፃ አዲስ ሴቨር ሞተር ያቀርባል፣ ጉምሩክ ጭነቱን ይሸከማል |
| ≥3 ወራት | ደንበኞች ራሳቸው መግዛት አለባቸው. |
ለ) የኤሌክትሪክ ክፍሎች (M5 ሃርድዌር)
| የዋስትና ጊዜ | የዋስትና አገልግሎቶች |
| ≤3 ወራት | ደንበኞች ከተበታተኑ በኋላ መልሰው መላክ አለባቸው፣ ዝሆን ሮቦቲክስ አዲስ በነጻ መላክ እና ጭነቱን ወደ ቤት መሸከም አለበት። |
| 3-6 ወራት | ደንበኞች ከተበተኑ በኋላ መልሰው መላክ እና ጭነቱን ወደ ቤት እና ወደ ውጭ መላክ አለባቸው ፣ የዝሆን ሮቦቲክስ አዲስ በነጻ ይልካል። |
| ≥6 ወራት | ደንበኞች ራሳቸው መግዛት አለባቸው. |
ሐ) የሼል ክፍሎችን ጨምሮ የመዋቅር ክፍሎች
| የዋስትና ጊዜ | የዋስትና አገልግሎቶች |
| ≤1 አመት | የዝሆን ሮቦቲክስ አንድ ጊዜ ነፃ አዳዲስ ክፍሎችን ያቀርባል፣ ጉምሩክ ጭነቱን መሸከም አለበት። |
| ≥1 አመት | ደንበኞች ራሳቸው መግዛት አለባቸው. |
በቀረበው የዋስትና ጊዜ ውስጥ ኩባንያው ሮቦትን በነጻ በሚጠቀምበት ጊዜ የሚከሰቱትን ብልሽቶች ብቻ ያስተካክላል። ነገር ግን፣ በሚከተሉት ሁኔታዎች ደንበኛው ለጥገና (በዋስትና ጊዜም ቢሆን) እንዲከፍል ይደረጋል።
- ከመመሪያው በተለየ ትክክለኛ አጠቃቀም እና ተገቢ ባልሆነ አጠቃቀም ምክንያት የሚደርስ ጉዳት ወይም ብልሽት።
- በደንበኛው ያልተፈቀደ መገንጠል ምክንያት አለመሳካቱ።
- ተገቢ ባልሆነ ማስተካከያ ወይም ያልተፈቀዱ ጥገናዎች ምክንያት የሚደርስ ጉዳት.
- ጉዳቱ የሚከሰተው እንደ የመሬት መንቀጥቀጥ እና ጎርፍ ባሉ የተፈጥሮ አደጋዎች ነው።
እባክዎን ሮቦቱን ለመስራት በዚህ መመሪያ እና ተዛማጅ መመሪያ ውስጥ ያሉትን መመሪያዎች በጥብቅ ይከተሉ።
ጥያቄ እና መልስ፡
https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
ጥ፡ አጣማሪው ተጓዳኝ መሳሪያውን ማግኘት አልቻለም?
መ: መሣሪያው ሊዳብር የሚችለው የልማት አካባቢን ካቀናበረ እና ተዛማጅ የፕሮጀክት ቤተ-መጽሐፍትን ከተጫነ በኋላ ብቻ ነው።
ጥ፡ አቀናባሪው ኤስን ማጠናቀር አልቻለምampተጓዳኙን መሣሪያ ለማግኘት በትክክል ፕሮግራም ያደርጉ?
መ: አስፈላጊው የፕሮጀክት ቤተ-መጽሐፍት አልተጫነም ወይም ከፕሮጀክት ቤተ-መጽሐፍት ጋር ግጭት አለ. እባክዎ መጀመሪያ የፕሮጀክት ቤተ-መጽሐፍት በትክክል መጫኑን ያረጋግጡ። በትክክል ከተጫነ u አሁንም ማጠናቀር የማይችል ከሆነ እባክዎን የአርዱዪኖ ልማት አካባቢን እንደገና ይጫኑ።
ጥ፡ መሣሪያውን ወደ ATOM ካቃጠለ በኋላ በትክክል መስራት አልቻለም?
መ: የ ATOM ተርሚናል firmware የፋብሪካችን firmware መጠቀም አለበት። ሌላ ማንኛውም ፈርምዌር በአጋጣሚ ከተቃጠለ የATOM ተርሚናልን ለማቃጠል myCobot ATOM ATOMMAIN መምረጥ ይችላሉ።
ጥ: በአቀባዊ አቀማመጥ ላይ ትንሽ ማወዛወዝ አለ ነገር ግን በእንቅስቃሴ ሁኔታ ውስጥ አይደለም?
መ: እባክህ የእኔ ሮቦት በአቀባዊ ሁኔታ ላይ መሆኑን አረጋግጥ። mycobiota በአቀባዊ ሁኔታ ውስጥ በስበት ኃይል አይጎዳም ፣ የሜካኒካል ባዶነት ጥቃቅን መንቀጥቀጥ ያስከትላል። ነገር ግን ከአቀባዊ ሁኔታ ውጭ በሚሆንበት ጊዜ መንቀጥቀጥ አይኖርም። የሚመከረው ፍጥነት በአቀባዊ ሁኔታ 400-500 ነው.
ጥ፡ የ ROS ስርዓት በኋላ ያስከፍላል?
መ: ROS ክፍት ምንጭ ነው እና ወደ Github ይዘምናል። ለ firmware ማሻሻያዎች ምንም ክፍያ የለም።
ያግኙን
የእርዳታ ፍላጎት ካሎት፣ እባክዎን በሚከተለው መልኩ ያግኙን።
Shenzhen Elephant Robotics Technology Co., Ltd
አድራሻ፡ B7፣ Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, China
ኢሜይል፡- support@elephantrobotics.com
ስልክ፡ +86(0755)-8696-8565 (የስራ ቀን 9፡30-18፡30)
Webጣቢያ፡ www.elephantrobotics.com
ትዊተር: CobotMy

ሰነዶች / መርጃዎች
 |
ዝሆን ሮቦቲክስ ማይኮቦት ስድስት-ዘንግ የትብብር ሮቦት ክንድ [pdf] የተጠቃሚ መመሪያ ማይኮቦት፣ ስድስት-ዘንግ የትብብር ሮቦት ክንድ፣ ማይኮቦት ስድስት-ዘንግ የትብብር ሮቦት ክንድ፣ V20210309 |



