STMicroelectronics UM2193 MotionAR የእንቅስቃሴ እውቅና ቤተ-መጽሐፍት።
መግቢያ
Motion AR የX-CUBE-MEMS1 ሶፍትዌር የመሃል ዌር ቤተ-መጽሐፍት አካል ሲሆን በSTM32 ላይ ይሰራል። በተጠቃሚው የሚሰራውን የእንቅስቃሴ አይነት ላይ ቅጽበታዊ መረጃን ይሰጣል። የሚከተሉትን ተግባራት መለየት ይችላል-ቋሚ, መራመድ, ፈጣን መራመድ, መሮጥ, ብስክሌት መንዳት, መንዳት.
ይህ ቤተ-መጽሐፍት ከST MEMS ጋር ብቻ ለመስራት የታሰበ ነው።
አልጎሪዝም የሚቀርበው በስታቲካል ቤተ መፃህፍት ቅርጸት ነው እና በ ARM® Cortex®-M32፣ ARM® Cortex®-M3፣ ARM® Cortex®-M33 ወይም ARM® Cortex®-M4 አርክቴክቸር መሰረት በ STM7 ማይክሮ ተቆጣጣሪዎች ላይ ጥቅም ላይ እንዲውል የተቀየሰ ነው።
በተለያዩ የ STM32 ማይክሮ መቆጣጠሪያ መሳሪያዎች ላይ ተንቀሳቃሽነትን የሚያቃልል በ STM32Cube ሶፍትዌር ቴክኖሎጂ ላይ የተገነባ ነው።
ሶፍትዌሩ ከኤስampየ ‹NUCLEO-IKS01A3› ወይም X-NUCLEO-IKS4A1 ማስፋፊያ ቦርድ በNUCLO-F401RE፣ NUCLO-L152RE ወይም NUCLEO-U575ZI-Q ልማት ቦርድ ላይ የሚሰራ le ትግበራ።
ምህጻረ ቃላት እና አህጽሮተ ቃላት
ሠንጠረዥ 1. የአህጽሮተ ቃላት ዝርዝር
| ምህጻረ ቃል | መግለጫ |
| ኤፒአይ | የመተግበሪያ ፕሮግራሚንግ በይነገጽ |
| ቢኤስፒ | የቦርድ ድጋፍ ጥቅል |
| GUI | ግራፊክ የተጠቃሚ በይነገጽ |
| HAL | የሃርድዌር ረቂቅ ንብርብር |
| አይዲኢ | የተቀናጀ ልማት አካባቢ |
በX-CUBE-MEMS1 ሶፍትዌር መስፋፋት ውስጥ Motion AR middleware ቤተ-መጽሐፍት
እንቅስቃሴ AR አልቋልview
የMotion AR ቤተ-መጽሐፍት የX-CUBE-MEMS1 ሶፍትዌርን ተግባር ያሰፋዋል።
ቤተ መፃህፍቱ ከፍጥነት መለኪያው መረጃን ያገኛል እና በተጠቃሚው የተከናወነውን የእንቅስቃሴ አይነት መረጃ ይሰጣል።
ቤተ መፃህፍቱ የተነደፈው ለST MEMS ብቻ ነው። ሌሎች MEMS ዳሳሾች ሲጠቀሙ ተግባራዊነት እና አፈጻጸም አልተተነተኑም እና በሰነዱ ውስጥ ከተገለጹት በጣም የተለየ ሊሆን ይችላል.
Sample ትግበራ በ NUCLO-F01RE ፣ NUCLEO-L3RE ወይም NUCLEO-U4ZI-Q ልማት ሰሌዳ ላይ በተጫኑ በ X-NUCLEO-IKS1A401 ወይም X-NUCLEO-IKS152A575 ማስፋፊያ ቦርዶች ላይ ይገኛል።
Motion AR ቤተ-መጽሐፍት
የMotion AR APIs ተግባራትን እና ግቤቶችን ሙሉ በሙሉ የሚገልጽ ቴክኒካዊ መረጃ በMotionAR_Package.chm በተቀናበረ HTML ውስጥ ይገኛል። file በሰነድ ማህደር ውስጥ ይገኛል።
Motion AR ላይብረሪ መግለጫ
- የMotion AR እንቅስቃሴ ማወቂያ ቤተ-መጽሐፍት ከአክስሌሮሜትር የተገኘ መረጃን ያስተዳድራል፤ ባህሪያት፡-
- የሚከተሉትን ተግባራት የመለየት እድል-ቋሚ ፣ መራመድ ፣ ፈጣን መራመድ ፣ መሮጥ ፣ ብስክሌት መንዳት ፣ መንዳት
- በፍጥነት መለኪያ መረጃ ላይ ብቻ የተመሰረተ እውቅና
- ተፈላጊ የፍጥነት መለኪያ ዳታ sampየሊንግ ድግግሞሽ: 16 Hz
- የሀብት መስፈርቶች፡-
- Cortex-M3: 8.5 ኪባ ኮድ እና 1.4 ኪባ የውሂብ ማህደረ ትውስታ
- Cortex-M33: 7.8 ኪባ ኮድ እና 1.4 ኪባ የውሂብ ማህደረ ትውስታ
- Cortex-M4: 7.9 ኪባ ኮድ እና 1.4 ኪባ የውሂብ ማህደረ ትውስታ
- Cortex-M7: 8.1 ኪባ ኮድ እና 1.4 ኪባ የውሂብ ማህደረ ትውስታ
- ለ ARM Cortex-M3፣ Cortex-M33፣ Cortex-M4 እና Cortex-M7 አርክቴክቸር ይገኛል
MotionAR APIs
የMotionAR APIs እነዚህ ናቸው፡-
- uint8_t MotionAR_GetLibVersion(ቻር *ስሪት)
- የላይብረሪውን ስሪት ሰርስሮ ያወጣል።
- *ስሪት የ35 ቁምፊዎች ድርድር ጠቋሚ ነው።
- በስሪት ሕብረቁምፊ ውስጥ ያሉትን የቁምፊዎች ብዛት ይመልሳል
- ባዶ እንቅስቃሴ AR_ጀምር( ባዶ)
- የMotionAR ቤተ-መጽሐፍትን ማስጀመር እና የውስጥ ዘዴን ማዋቀር ያከናውናል።
- በ STM32 ማይክሮ መቆጣጠሪያ ውስጥ ያለው የCRC ሞጁል (በ RCC ተጓዳኝ ሰዓት አንቃ መመዝገቢያ ውስጥ) መሆን አለበት
ቤተ-መጽሐፍቱን ከመጠቀምዎ በፊት ነቅቷል
ማስታወሻ፡- ይህ ተግባር የፍጥነት መለኪያ መለኪያ ቤተ-መጽሐፍትን ከመጠቀምዎ በፊት መጠራት አለበት።
- ባዶ እንቅስቃሴ AR_ዳግም አስጀምር(ባዶ)
- የእንቅስቃሴ ማወቂያ ስልተ ቀመሮችን ዳግም ያስጀምራል።
- ባዶ እንቅስቃሴ (MAR_input_t *data_in፣ MAR_output_t *data_out፣ int64_t)
ጊዜamp)- የእንቅስቃሴ ማወቂያ ስልተ-ቀመርን ያከናውናል
- *ዳታ_ኢን ፓራሜትር የግቤት ውሂብ ላለው መዋቅር አመላካች ነው።
- የMAR_input_t መዋቅር አይነት መለኪያዎች፡-
- acc_x የፍጥነት መለኪያ ዳሳሽ ዋጋ በ X ዘንግ በ g
- acc_y የፍጥነት መለኪያ ዳሳሽ ዋጋ በ Y ዘንግ በ g ነው።
- acc_z የፍጥነት መለኪያ ዳሳሽ ዋጋ በZ ዘንግ በጂ ነው።
- *የውሂብ_ውጭ መለኪያ ከሚከተሉት ንጥሎች ጋር ለመዘርዘር ጠቋሚ ነው፡
- ማር_NOACTIVITY = 0
- MAR_STATIONARY = 1
- MAR_WALKING = 2
- MAR_FASTWALKING = 3
- MAR_JOGGING = 4
- ማር_ቢኪንግ = 5
- MAR_DRIVING = 6
- ጊዜamp ለትክክለኛዎቹ አንጻራዊ ጊዜ ነውample በ ms
- ባዶ MotionAR_ አቀማመጥ_አዘጋጅ (const char *acc_ orientation)
- የፍጥነት መለኪያ መረጃ አቀማመጥን ያዘጋጃል።
- ውቅሩ ብዙውን ጊዜ የሚከናወነው ከMotion AR_ Initialize ተግባር ጥሪ በኋላ ነው።
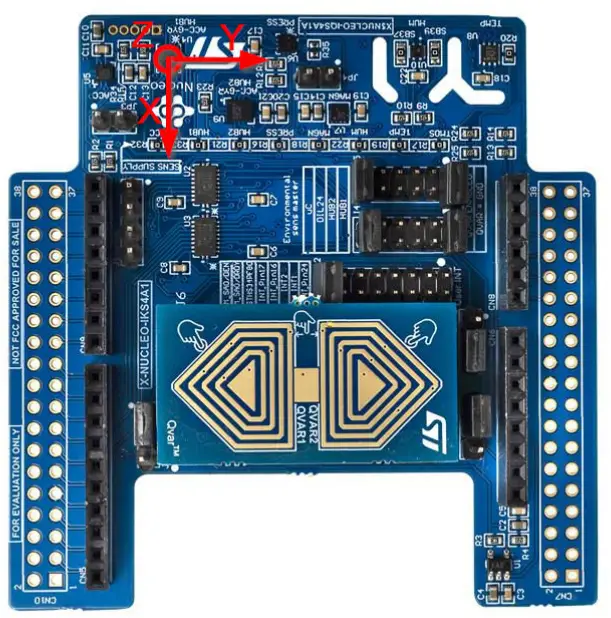
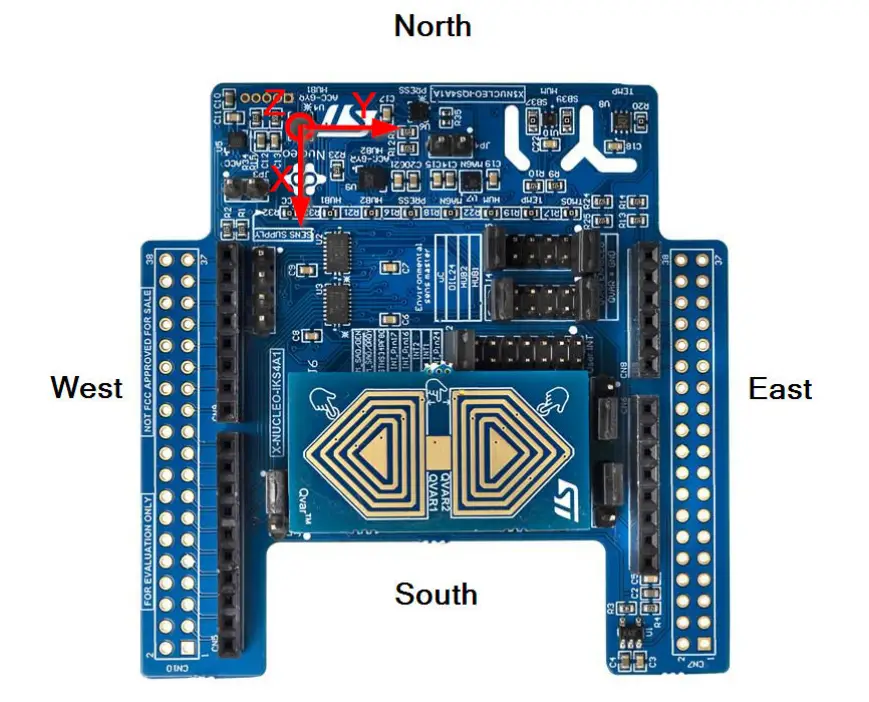
- * acc_ orientation መለኪያ የሦስት ቁምፊዎች ሕብረቁምፊ ጠቋሚ ነው፣ የእያንዳንዱን የማጣቀሻ ፍሬም አወንታዊ አቅጣጫዎች ለፍጥነት መለኪያ ውሂብ ውፅዓት፣ በቅደም ተከተል x፣ y፣ z። ትክክለኛ እሴቶች፡ n (ሰሜን) ወይም ሰ (ደቡብ)፣ w (ምዕራብ) ወይም e (ምስራቅ)፣ u (ላይ) ወይም d (ታች) ናቸው።
- ከታች ባለው ስእል እንደሚታየው የ X-NUCLEO-IKS4A1 የፍጥነት መለኪያ ዳሳሽ SEU (x-South, y- East, z-Up) አለው, ስለዚህ ገመዱ: "seu" ነው.
ምስል 1. ዳሳሽ ዝንባሌ example
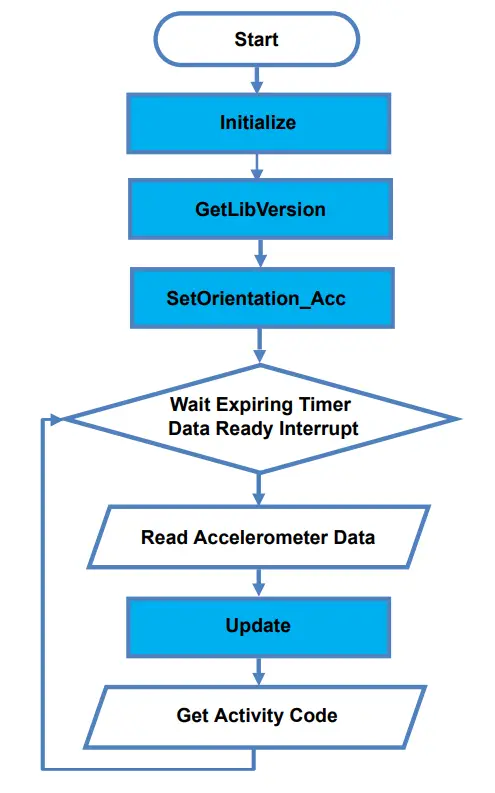
የኤፒአይ ፍሰት ቻር
ምስል 2. Motion AR API ሎጂክ ቅደም ተከተል
የማሳያ ኮድ
የሚከተለው የማሳያ ኮድ ከፍጥነት መለኪያ ዳሳሽ መረጃን ያነባል እና የእንቅስቃሴ ኮዱን ያገኛል
[…] #VERSION_STR_LENG 35ን ይግለጹ […] /*** ማስጀመር ***/ የቻርሊብ ስሪት[VERSION_STR_LENG]; char acc_orientation[] = "seu"; /* የእንቅስቃሴ ማወቂያ ኤፒአይ ማስጀመሪያ ተግባር */ MotionAR_Initialize(); /* አማራጭ፡ ስሪት ያግኙ */ MotionAR_GetLibVersion(lib_version); /* የፍጥነት መለኪያ አቀማመጥን አዘጋጅ */ MotionAR_SetOrientation_Acc(acc_orientation); [...] /*** የእንቅስቃሴ ማወቂያ አልጎሪዝምን በመጠቀም ***/ የሰዓት ቆጣሪ_ OR_ የውሂብ መጠን_ ማቋረጥ_ ተቆጣጣሪ() {
MAR_input_t ውሂብ_ ውስጥ; MAR_ ውፅዓት_ t እንቅስቃሴ; /* ማፋጠን X/Y/Z በ g */ MEMS_Read_AccValue(&data_in.acc_x፣ &data_in.acc_y፣ &data_in.acc_z) ያግኙ። /* የአሁኑን ጊዜ በ ms */ TIMER_Get_TimeValue(×t.) ያግኙamp_ወይዘሪት)፤ /* የተግባር ማወቂያ አልጎሪዝም ማሻሻያ */ MotionAR_Update (ውሂብ_ውስጥ፣ ዳታ_ውጭ፣ ጊዜስትamp_ወይዘሪት)፤ }
የአልጎሪዝም አፈጻጸም
የእንቅስቃሴ ማወቂያ አልጎሪዝም መረጃን ከፍጥነት መለኪያው ብቻ ይጠቀማል እና በዝቅተኛ ድግግሞሽ (16 Hz) ይሰራል የኃይል ፍጆታን ይቀንሳል።
ሠንጠረዥ 2. የአልጎሪዝም አፈፃፀም
| እንቅስቃሴ | የማወቅ እድል (የተለመደ)(1) | ምርጥ አፈጻጸም | የተጋለጠ | ቦታዎችን ይያዙ |
| የጽህፈት መሳሪያ | 92.27% | በእጅ በመያዝ እና ከባድ የጽሑፍ መልእክት መላክ | ሁሉም፡ ሱሪ ኪስ፣ ሸሚዝ ኪስ፣ የኋላ ኪስ፣ ከጭንቅላቱ አጠገብ፣ ወዘተ. | |
| መራመድ | 99.44% | የእርምጃ መጠን ≥ 1.4 ደረጃ/ሰ | የእርምጃ መጠን ≤ 1.2 ደረጃ/ሰ | ሁሉም |
| ፈጣን የእግር ጉዞ | 95.94% | የእርምጃ መጠን ≥ 2.0 ደረጃ/ሰ | ሁሉም | |
| መሮጥ | 98.49% | የእርምጃ መጠን ≥ 2.2 ደረጃ/ሰ | የሚፈጀው ጊዜ <1 ደቂቃ; ፍጥነት <8 ኪሜ/ሰ | ሱሪ ኪስ፣ ክንድ ማወዛወዝ፣ በእጅ |
| ብስክሌት መንዳት | 91.93% | የውጪ ፍጥነት ≥11 ኪሜ/ሰ | የመንገደኞች መቀመጫ, የእጅ ጓንት | የጀርባ ቦርሳ፣ የሸሚዝ ኪስ፣ የሱሪ ኪስ |
| መንዳት | 78.65% | ፍጥነት ≥ 48 ኪ.ሜ | የመንገደኞች መቀመጫ, የእጅ ጓንት | ዋንጫ መያዣ፣ ዳሽ ቦርድ፣ የሸሚዝ ኪስ፣ ሱሪ ኪስ |
- የተለመዱ ዝርዝሮች ዋስትና አይሰጡም
ሠንጠረዥ 3. Cortex-M4 እና Cortex-M3፡ ያለፈ ጊዜ (µs) አልጎሪዝም
| Cortex-M4 STM32F401RE በ84 ሜኸ | Cortex-M3 STM32L152RE በ32 ሜኸ | ||||
| ደቂቃ | አማካኝ | ከፍተኛ | ደቂቃ | አማካኝ | ከፍተኛ |
| 2 | 6 | 153 | 8 | 130 | 4883 |
ሠንጠረዥ 4. Cortex-M33 እና Cortex-M7: ያለፈ ጊዜ (μs) አልጎሪዝም
| Cortex-M33 STM32U575ZI-Q በ160 ሜኸር | Cortex-M7 STM32F767ZI በ96 ሜኸ | ||||
| ደቂቃ | አማካኝ | ከፍተኛ | ደቂቃ | አማካኝ | ከፍተኛ |
| < 1 | 2 | 74 | 5 | 9 | 145 |
Sample መተግበሪያ
የMotionAR መካከለኛ ዌር የተጠቃሚ አፕሊኬሽኖችን ለመገንባት በቀላሉ መጠቀም ይቻላል፤ እንደample መተግበሪያ በመተግበሪያው አቃፊ ውስጥ ቀርቧል።
የተነደፈው በNUCLO-F401RE፣ NUCLO-L152RE ወይም NUCLO-U575ZI-Q ከ X-NUCLEO-IKS01A3 ወይም X-NUCLEO-IKS4A1 ማስፋፊያ ቦርድ ጋር በተገናኘ የዲቬሎፕመንት ቦርድ ነው።
አፕሊኬሽኑ የተከናወኑ ተግባራትን በቅጽበት ያውቃል። ውሂብ በ GUI በኩል ሊታይ ይችላል። አልጎሪዝም ቋሚ፣ መራመድ፣ ፈጣን መራመድ፣ መሮጥ፣ ብስክሌት መንዳት እና የመንዳት እንቅስቃሴዎችን ያውቃል። ቅጽበታዊ ውሂብን ለመከታተል የዩኤስቢ ገመድ ግንኙነት ያስፈልጋል። ቦርዱ በዩኤስቢ ግንኙነት በፒሲ ነው የሚሰራው። ይህ ተጠቃሚው የተገኘውን እንቅስቃሴ፣ የፍጥነት መለኪያ ዳታ፣ የጊዜ stamp እና በመጨረሻም ሌላ ዳሳሽ ውሂብ፣ በቅጽበት፣ MEMS-Studio GUI መተግበሪያን በመጠቀም።
MEMS-ስቱዲዮ መተግበሪያ
Sample መተግበሪያ የ MEMS-Studio GUI መተግበሪያን ይጠቀማል፣ ይህም ከ ማውረድ ይችላል። www.st.com.
ደረጃ 1. አስፈላጊዎቹ አሽከርካሪዎች መጫኑን እና የ STM32 ኑክሊዮ ቦርድ ከተገቢው የማስፋፊያ ሰሌዳ ጋር ከፒሲ ጋር መገናኘቱን ያረጋግጡ።
ደረጃ 2. ዋናውን የመተግበሪያ መስኮት ለመክፈት MEMS-Studio መተግበሪያን ያስጀምሩ።
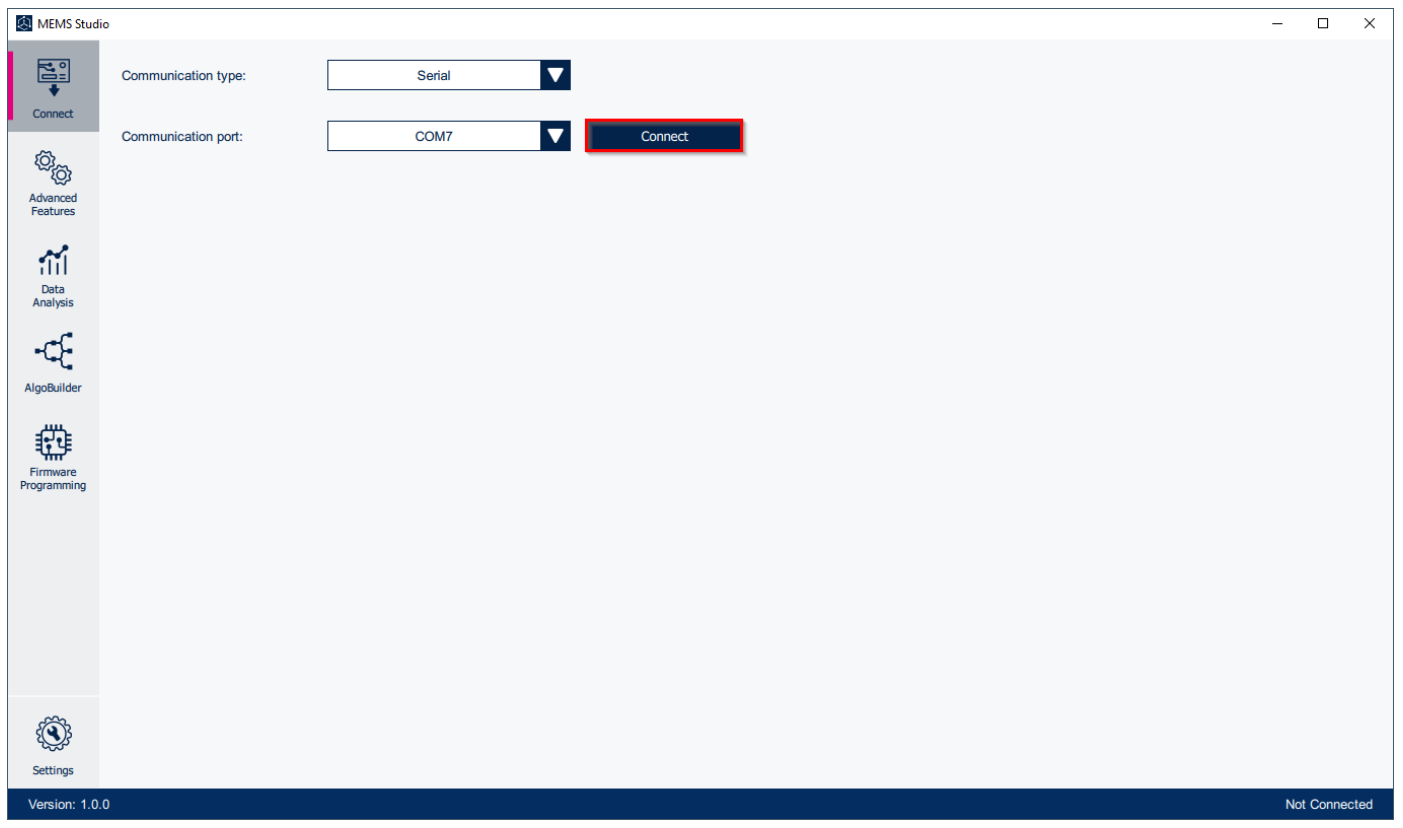
የሚደገፍ ፈርምዌር ያለው STM32 Nucleo ሰሌዳ ከፒሲ ጋር ከተገናኘ ተገቢውን የ COM ወደብ በራስ ሰር ተገኝቷል። ይህንን ወደብ ለመክፈት የግንኙነት ቁልፍን ተጫን።
ምስል 3. MEMS-ስቱዲዮ - አገናኝ
ደረጃ 3. ከSTM32 ኑክሊዮ ቦርድ ከሚደገፈው የጽኑዌር ቤተ መፃህፍት ጋር ሲገናኝ ይከፈታል።
የውሂብ ማስተላለፍን ለመጀመር እና ለማቆም ተገቢውን ቀይር ![]() ጀምር /
ጀምር / ![]() የማቆሚያ ቁልፍ በውጫዊው ቋሚ የመሳሪያ አሞሌ ላይ።
የማቆሚያ ቁልፍ በውጫዊው ቋሚ የመሳሪያ አሞሌ ላይ።
ከተገናኘው ዳሳሽ የሚመጣው ውሂብ ሊሆን ይችላል viewed በውስጥ አቀባዊ የመሳሪያ አሞሌ ላይ ያለውን የውሂብ ሰንጠረዥ ትርን መምረጥ።
ምስል 4. MEMS-ስቱዲዮ - የቤተ መፃህፍት ግምገማ - የውሂብ ሰንጠረዥ
ምስል 5. MEMS-ስቱዲዮ - የቤተ-መጽሐፍት ግምገማ - የእንቅስቃሴ እውቅና
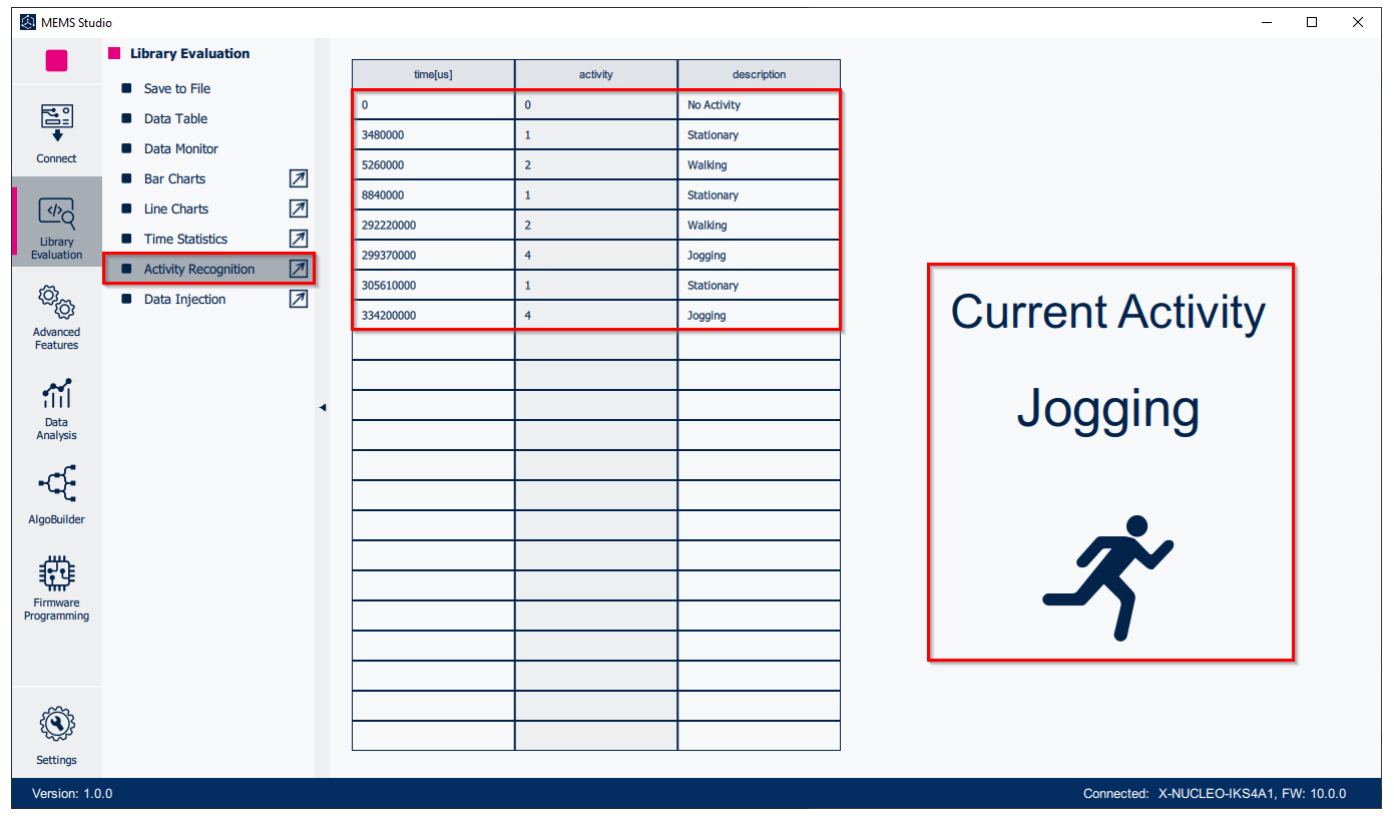
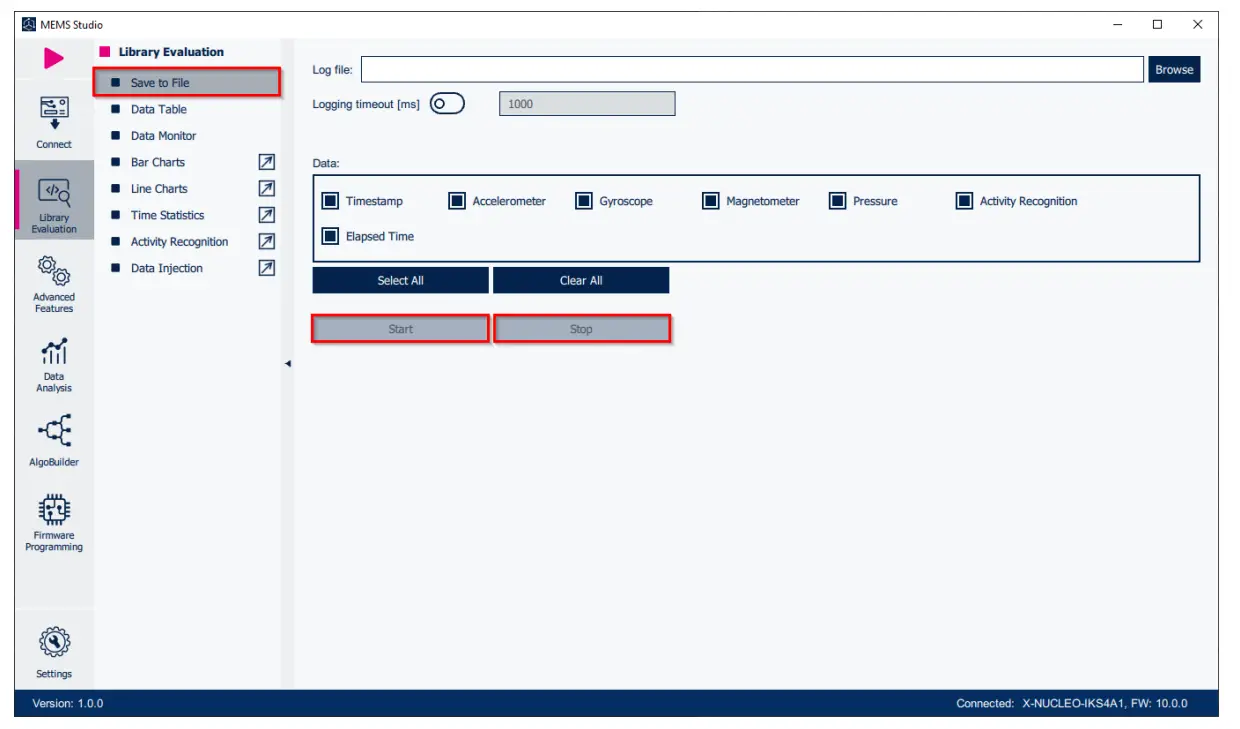
ደረጃ 5. አስቀምጥን ይምረጡ File የውሂብ ምዝግብ ማስታወሻ ውቅረት መስኮቱን ለመክፈት በውስጠኛው ቋሚ የመሳሪያ አሞሌ ላይ ትር። ለመግባት የትኛውን ዳሳሽ እና የእንቅስቃሴ ውሂብ እንደሚያስቀምጡ ይምረጡ file. ተጓዳኝ ጀምር / አቁም ቁልፍን ጠቅ በማድረግ ማስቀመጥ መጀመር ወይም ማቆም ትችላለህ።
ምስል 6. MEMS-ስቱዲዮ - የቤተ-መጽሐፍት ግምገማ - አስቀምጥ ወደ File
ዋቢዎች
ሁሉም የሚከተሉት መገልገያዎች በነጻ ይገኛሉ www.st.com.
- UM1859፡ በX-CUBE-MEMS1 እንቅስቃሴ MEMS እና የአካባቢ ዳሳሽ ሶፍትዌር መስፋፋት ለSTM32Cube መጀመር
- UM1724፡ STM32 ኑክሊዮ-64 ሰሌዳዎች (MB1136)
- UM3233፡ በ MEMS-Studio መጀመር
የክለሳ ታሪክ
ሠንጠረዥ 5. የሰነድ ማሻሻያ ታሪክ
| ቀን | ሥሪት | ለውጦች |
| 10-ኤፕሪል-2017 | 1 | የመጀመሪያ ልቀት |
| 26-ጥር-2018 | 2 | ክፍል 3 S ተዘምኗልample መተግበሪያ. ለ NUCLO-L152RE ልማት ቦርድ እና ሠንጠረዥ 3. ያለፈ ጊዜ (μs) አልጎሪዝም ማጣቀሻዎች ታክለዋል። |
| 19-ማርች-2018 | 3 | የዘመነ መግቢያ፣ ክፍል 2.1 Motion AR አልቋልview እና ክፍል 2.2.5 የአልጎሪዝም አፈፃፀም. |
| 14-ፌብሩዋሪ-2019 | 4 | የተሻሻለው ምስል 1. ዳሳሽ ዝንባሌ example, ሠንጠረዥ 3. ያለፈ ጊዜ (µs) አልጎሪዝም እና ምስል 3. STM32 ኒውክሊዮ፡ ኤልኢዲዎች፣ ቁልፍ፣ መዝለያ። የ X-NUCLEO-IKS01A3 ማስፋፊያ ቦርድ ተኳሃኝነት መረጃ ታክሏል። |
| 20-ማርች-2019 | 5 | የተሻሻለው ክፍል 2.2.2 Motion AR APIs, ምስል 3. MEMS-Studio - Connect, Figure 4. MEMS-Studio - የቤተ መፃህፍት ግምገማ - የውሂብ ሰንጠረዥ, ምስል 5. MEMS-ስቱዲዮ - የቤተ መፃህፍት ግምገማ - የእንቅስቃሴ እውቅና እና ምስል 6. MEMS-ስቱዲዮ - የቤተ-መጽሐፍት ግምገማ - አስቀምጥ ወደ File. |
| 04-ኤፕሪል-2024 | 6 | አዘምን ክፍል መግቢያ, ክፍል 2.1፡ MotionAR አልቋልview, ክፍል 2.2.1: MotionAR ቤተ መጻሕፍት መግለጫ, MotionAR APIs፣ ክፍል 2.2.4: ማሳያ ኮድ, ክፍል 2.2.5: አልጎሪዝም አፈጻጸም, ክፍል 3፡ ኤስample መተግበሪያ እና ክፍል 4: MEMS-ስቱዲዮ መተግበሪያ. |
አስፈላጊ ማስታወቂያ - በጥንቃቄ ያንብቡ
STMicroelectronics NV እና ተባባሪዎቹ ("ST") በST ምርቶች እና/ወይም በዚህ ሰነድ ላይ ያለማሳወቂያ በማንኛውም ጊዜ ለውጦችን፣ እርማቶችን፣ ማሻሻያዎችን፣ ማሻሻያዎችን እና ማሻሻያዎችን የማድረግ መብታቸው የተጠበቀ ነው። ገዢዎች ትእዛዝ ከማስገባታቸው በፊት ስለ ST ምርቶች ወቅታዊ መረጃ ማግኘት አለባቸው። የST ምርቶች የሚሸጡት በትእዛዙ እውቅና ጊዜ በ ST የሽያጭ ውሎች እና ሁኔታዎች መሠረት ነው።
ገዥዎች የST ምርቶችን የመምረጥ፣ የመምረጥ እና የመጠቀም ሃላፊነት አለባቸው እና ST ለትግበራ እርዳታ ወይም ለገዥዎች ምርቶች ዲዛይን ምንም አይነት ሃላፊነት አይወስድም።
ለማንኛውም የአእምሯዊ ንብረት መብት ምንም አይነት ፍቃድ፣ ግልጽ ወይም በተዘዋዋሪ በST አይሰጥም።
የ ST ምርቶችን እንደገና መሸጥ በዚህ ውስጥ ከተገለጸው መረጃ የተለየ አቅርቦት በ ST ለእንደዚህ ዓይነቱ ምርት የሚሰጠውን ማንኛውንም ዋስትና ዋጋ ያጣል።
ST እና ST አርማ የST የንግድ ምልክቶች ናቸው። ስለ ST የንግድ ምልክቶች ተጨማሪ መረጃ ለማግኘት ይመልከቱ www.st.com/trademarks. ሁሉም ሌሎች የምርት ወይም የአገልግሎት ስሞች የየባለቤቶቻቸው ንብረት ናቸው።
በዚህ ሰነድ ውስጥ ያለው መረጃ ከዚህ ቀደም በማንኛውም የዚህ ሰነድ ቀደምት ስሪቶች ውስጥ የቀረበውን መረጃ ይተካዋል እና ይተካል።
© 2024 STMicroelectronics - ሁሉም መብቶች የተጠበቁ ናቸው

ሰነዶች / መርጃዎች
 |
STMicroelectronics UM2193 MotionAR የእንቅስቃሴ እውቅና ቤተ-መጽሐፍት። [pdf] የተጠቃሚ መመሪያ UM2193 MotionAR የእንቅስቃሴ እውቅና ቤተ መፃህፍት፣ UM2193፣ MotionAR እንቅስቃሴ እውቅና ቤተ መፃህፍት፣ የእንቅስቃሴ እውቅና ቤተ መፃህፍት፣ እውቅና ቤተ መፃህፍት፣ ቤተ መፃህፍት |


